81
Python API:
Function: armor_ctrl.check_condition(condition_enum)
Parameters:
● condition_enum(enum):
■ rm_define.cond_armor_hit
■ rm_define.cond_armor_bottom_front_hit
■ rm_define.cond_armor_bottom_back_hit
■ rm_define.cond_armor_bottom_left_hit
■ rm_define.cond_armor_bottom_right_hit
■ rm_define.cond_armor_top_left_hit
■ rm_define.cond_armor_top_right_hit
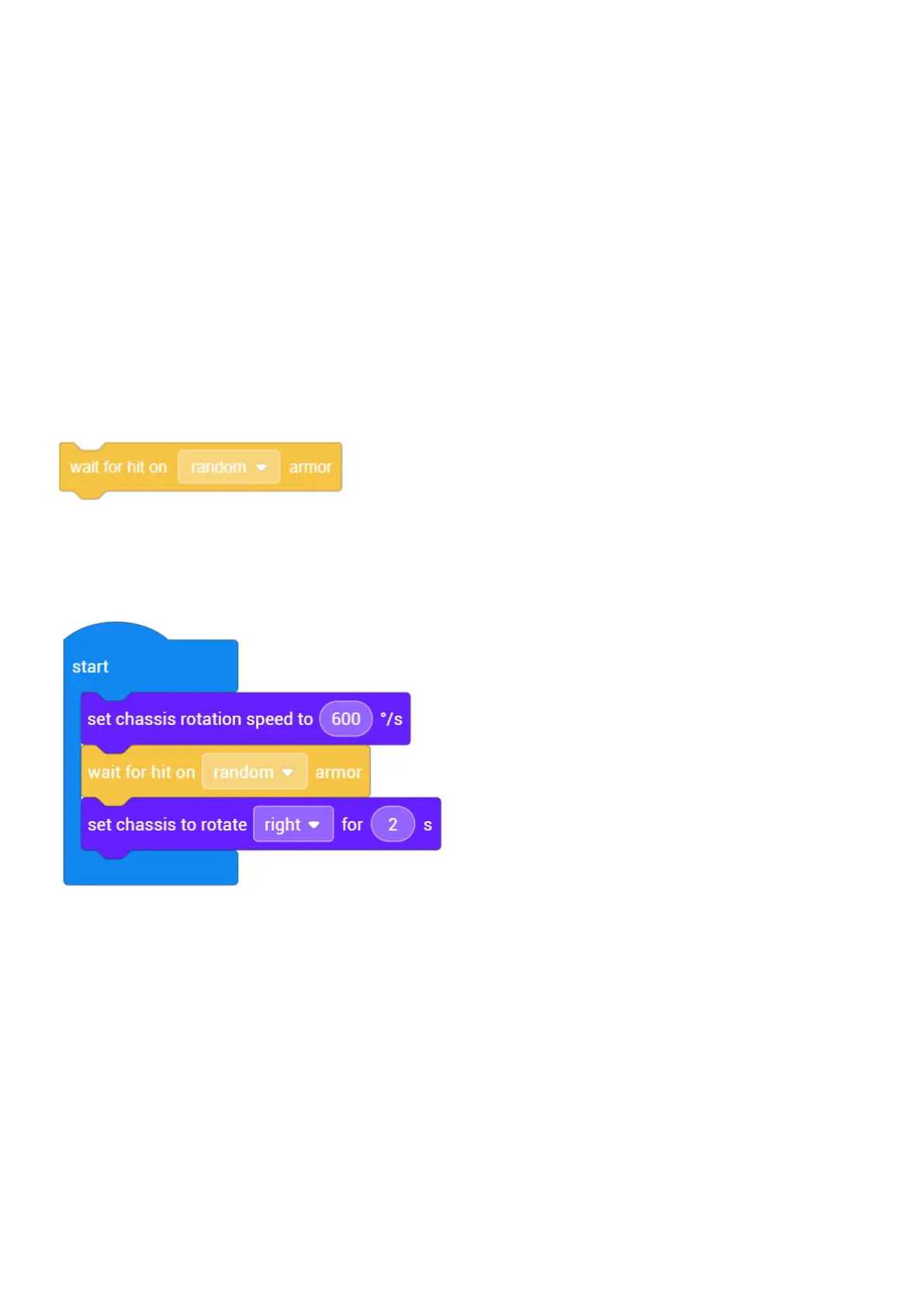
5. Wait for hit on (any) armor
(1) Description: Execute the next command when the specified armor is hit; otherwise, it continues to wait
(2) Type: Execution, blocking block
(3) Example: Self-defense
After the robot is attacked, the chassis quickly rotates to form a self-defense circle.
Note:
In this program, if the robot has no armor attacked, the program will stay on this block and wait when the block remains
highlighted.