93
Mobile Device
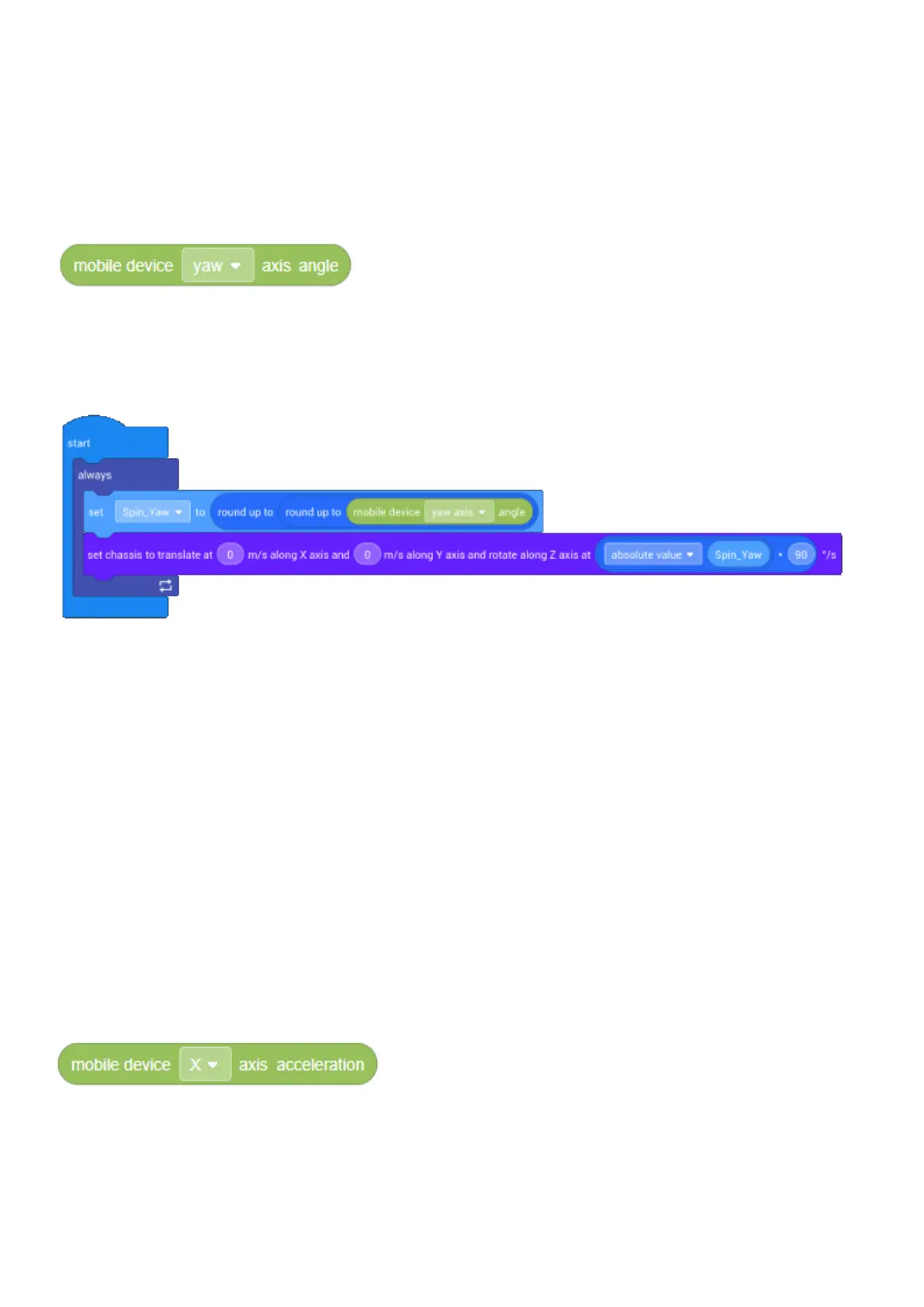
1. Mobile device (yaw) axis angle
(1) Description: Obtain the current angle value of a mobile device
(2) Type: Information block (variable-type data)
(3) Example: Dynamic rotation control
Rotate the mobile device to the left or right and observe whether the RoboMaster EP CORE’s chassis rotates accordingly.
Notes:
1) Mobile device refers to devices such as smartphones and tablets.
2) The built-in sensor settings of mobile devices may be different in models, obtain the value sent by the sensor in advance.
Python API:
Function: mobile_ctrl.get_attitude(attitude_enum)
Parameters:
● attitude_enum(enum):
■ rm_define.mobile_atti_pitch
■ rm_define.mobile_atti_roll
■ rm_define.mobile_atti_yaw
2. Mobile device (x-axis) acceleration
(1) Description: Obtain the exact rate of acceleration for a mobile device
(2) Type: Information block (variable-type data)
(3) Example: Dynamic forward control
Wave your mobile device up and down to control the RoboMaster EP CORE’s motion in a forward direction.