101
Note:
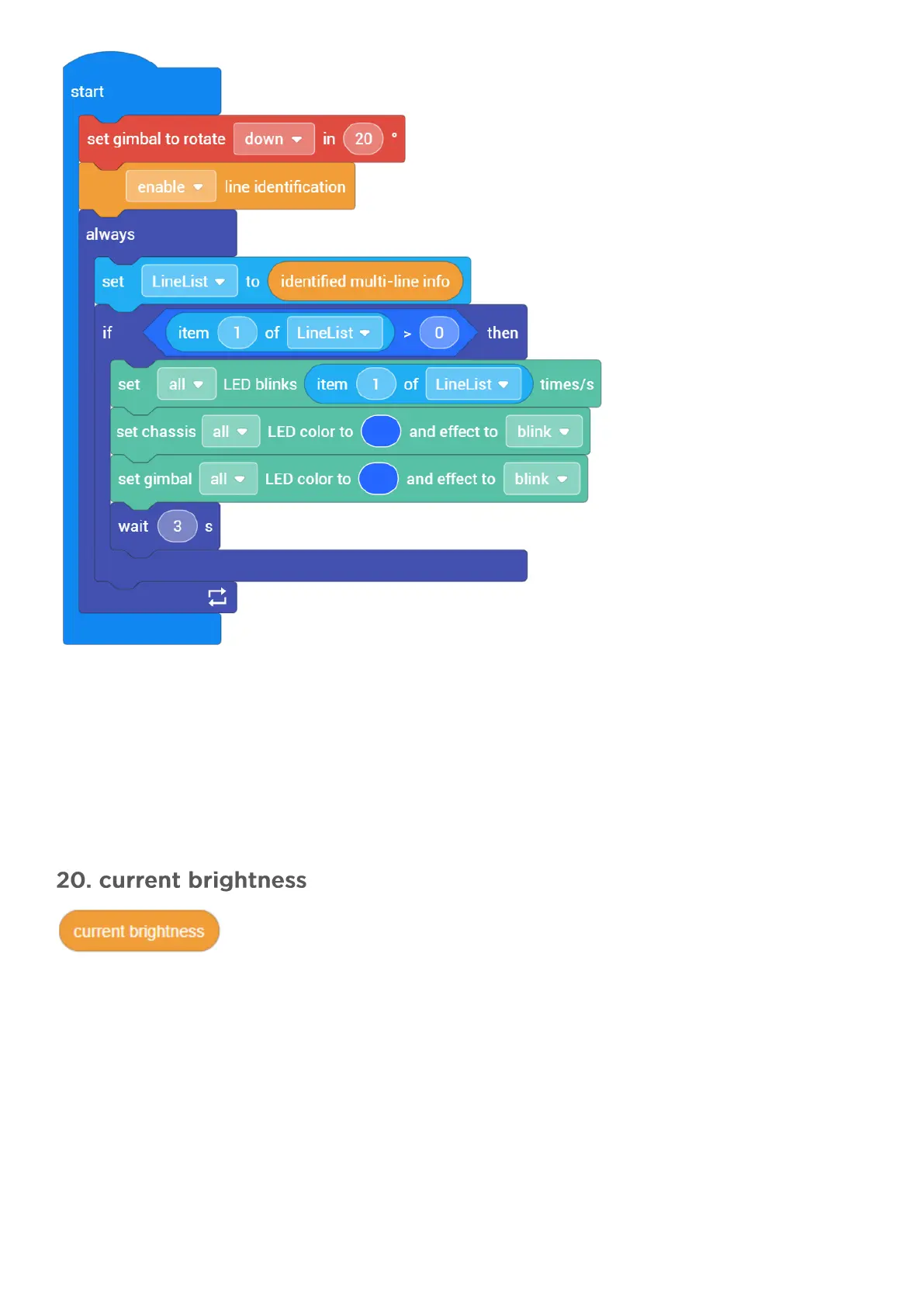
The multi-line information format identified by the robot is as follows:
The first item n (number of lines), from clockwise, the (Coordinate X, ordinate Y, actual tangent angle θ,
curvature C) of ten points that are equidistant from each other on the first line (from the nearest to the
farthest), the (X, Y, θ, C) of ten points on the second line ..., the (X, Y, θ, C) of ten points on the numbered n
line. There are altogether 40n +1 values.
Compared with the "Identifiable Single Line Information" module, the "Identifiable Multi-Line Information"
module has one feedback more on the number of lines.
(1) Objective: Obtains information about the brightness of the current environment and returns a value of
0-10; the greater the value is, the brighter the environment.
(2) Type: Information block (variable)
(3) Example: Translate toward light