118
≥
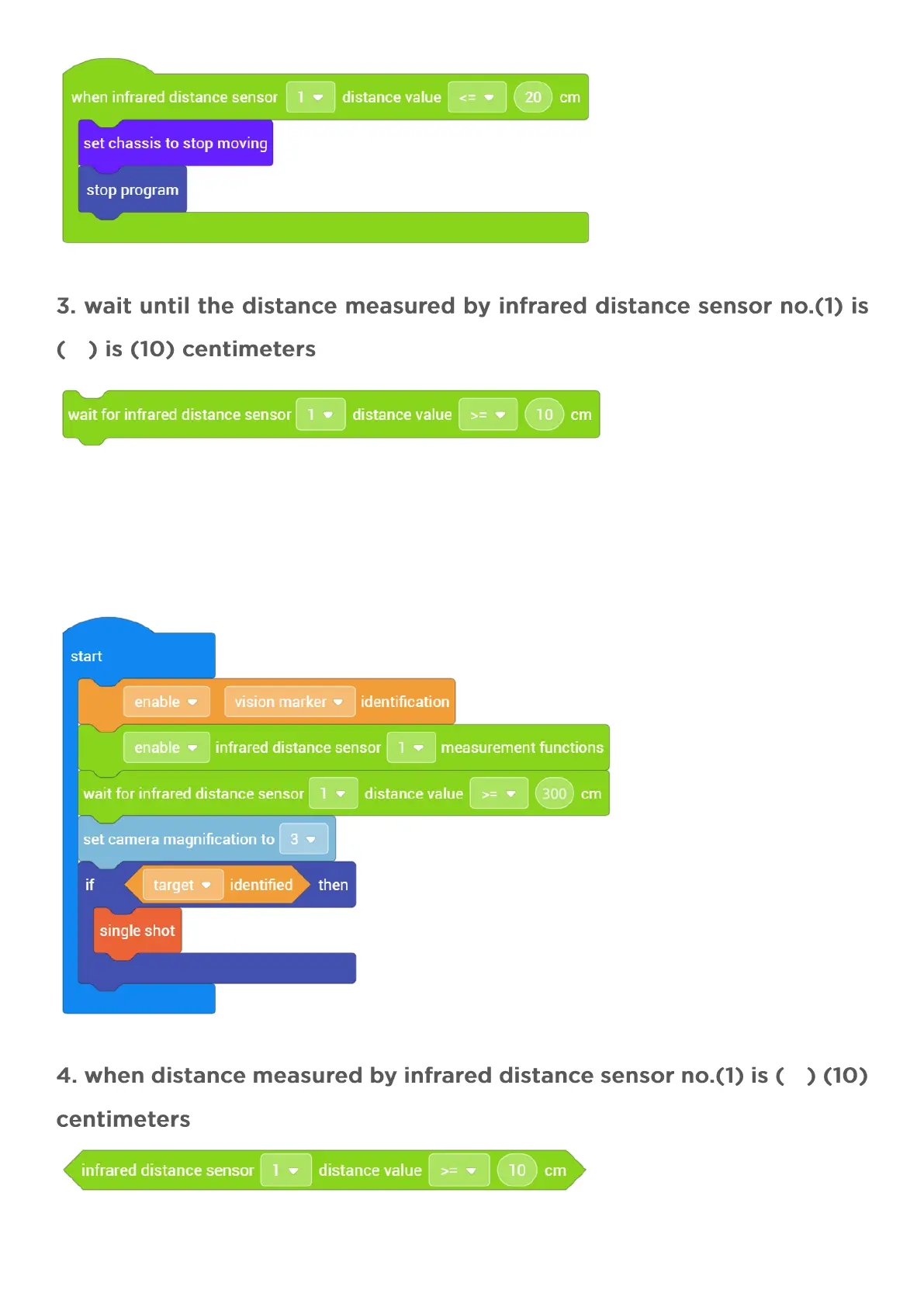
(1) Description: Execute the next instruction when the distance measured by the specified infrared distance
sensor (No.) meets the condition; otherwise, it will stay still and wait.
(2) Type: Execution, Blocking
(3) Example: Long-distance shooting
Hold a visual tag and back away from the robot. When the infrared distance sensor detects that the "target"
is already 3 meters away from the robot, the robot will fire a long range shot by zooming in with the camera.
≥