121
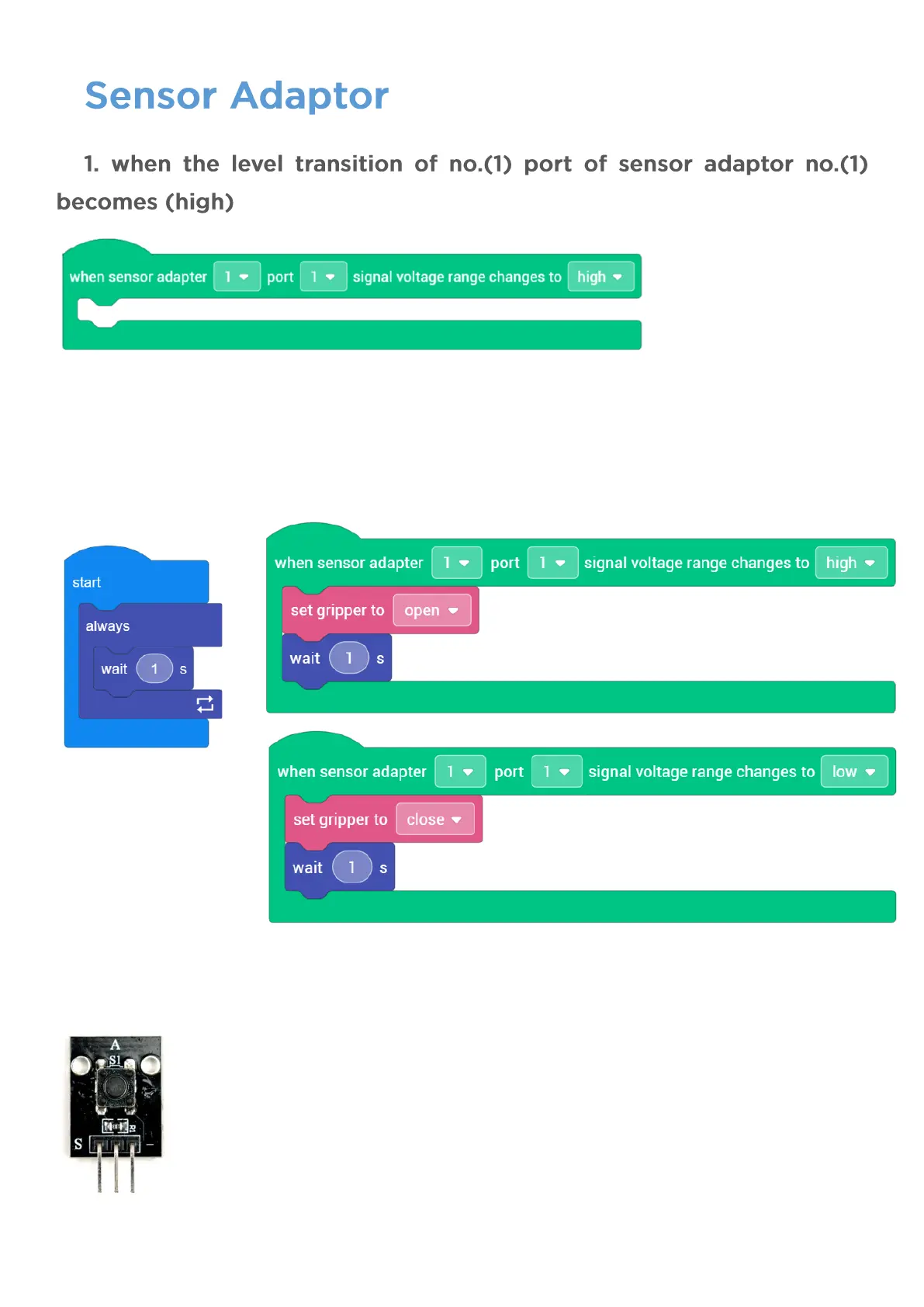
(1) Description: Execute the program in this module when the I/O pin level of the specified port of the
specified sensor adaptor meets the conditions.
(2) Type: Event
(3) Example: Use a button to control the opening or closing of the gripper.
Connect a button to sensor adaptor No.(1). When the button is pressed, the robot gripper opens. When the
button is released, the robot gripper closes.
Note: