122
1) The output level of the button can be high or low. When the button is "pressed" and "released", the output
level changes, and the I/O pin of the sensor adaptor receives the level signal change so as to control the
opening or closing of the gripper.
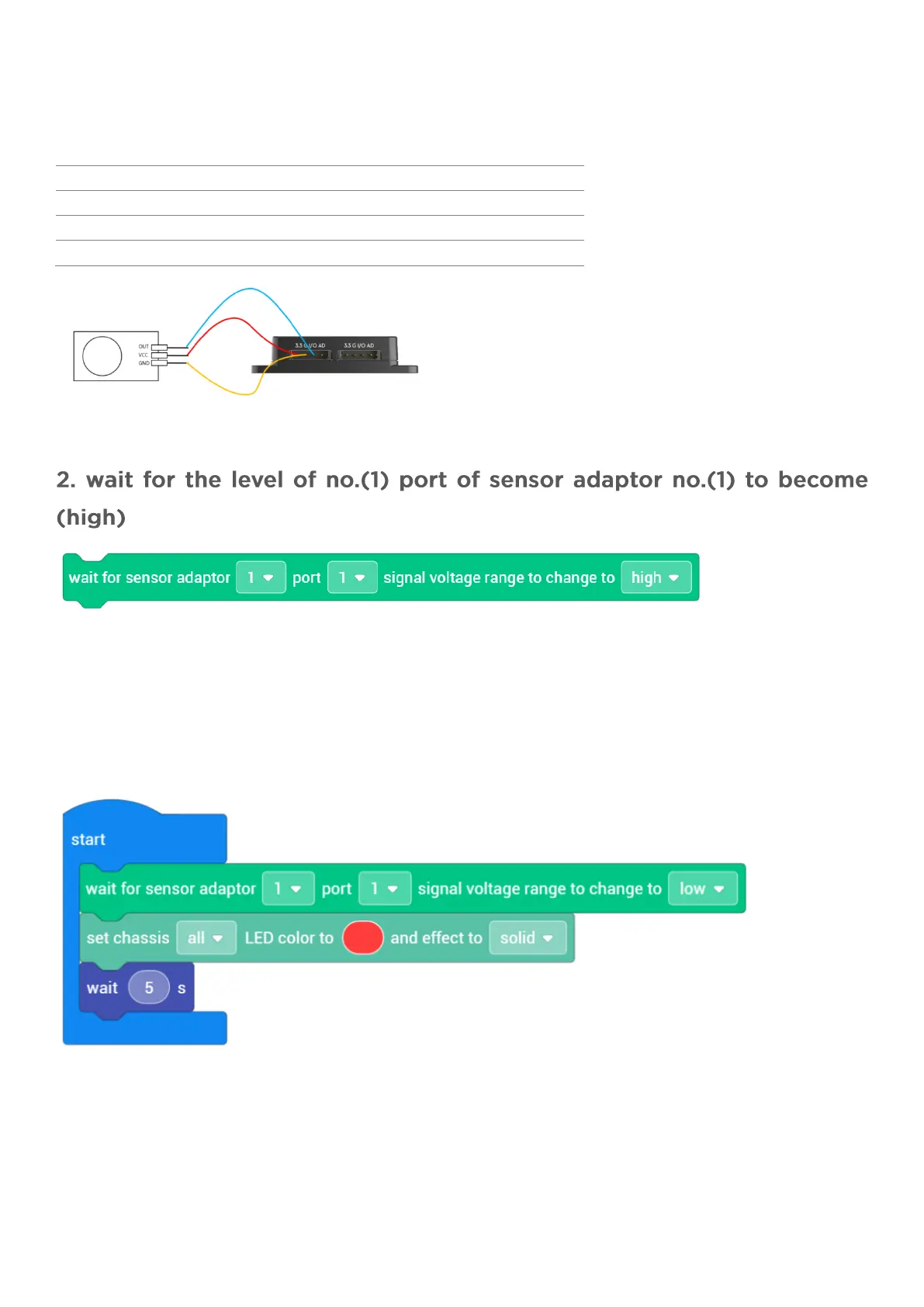
2) The three pins on the button need to be connected to the designated spots of the sensor adaptor through
DuPont wires:
3) A maximum of six sensor adaptors can be connected to the robot at the same time.
(1) Description: Execute the follow-up instructions when the I/O pin level of the specified port of the specified
sensor adaptor meets the conditions; otherwise it will continue to wait.
(2) Type: Execution, blocking
(3) Example: Give a warning when the decibel level is too high.
After a sound sensor is connected to sensor adaptor No.(1), if the detected sound is too loud, the chassis
LED indicator will turn solid red.
Note:
1) The sound signal received by the sound sensor used in this function design will output a high electrical
level if the signal does not reach the set threshold of the sensor, and a low level if the threshold is exceeded,
but the situation for different types of sound sensors varies.
2) Output levels by infrared obstacle avoidance sensors and touch sensors are only classified as high or low,
therefore, the robot can obtain functional area acquisition through the I/O port of the adaptor module that
 Loading...
Loading...

