127
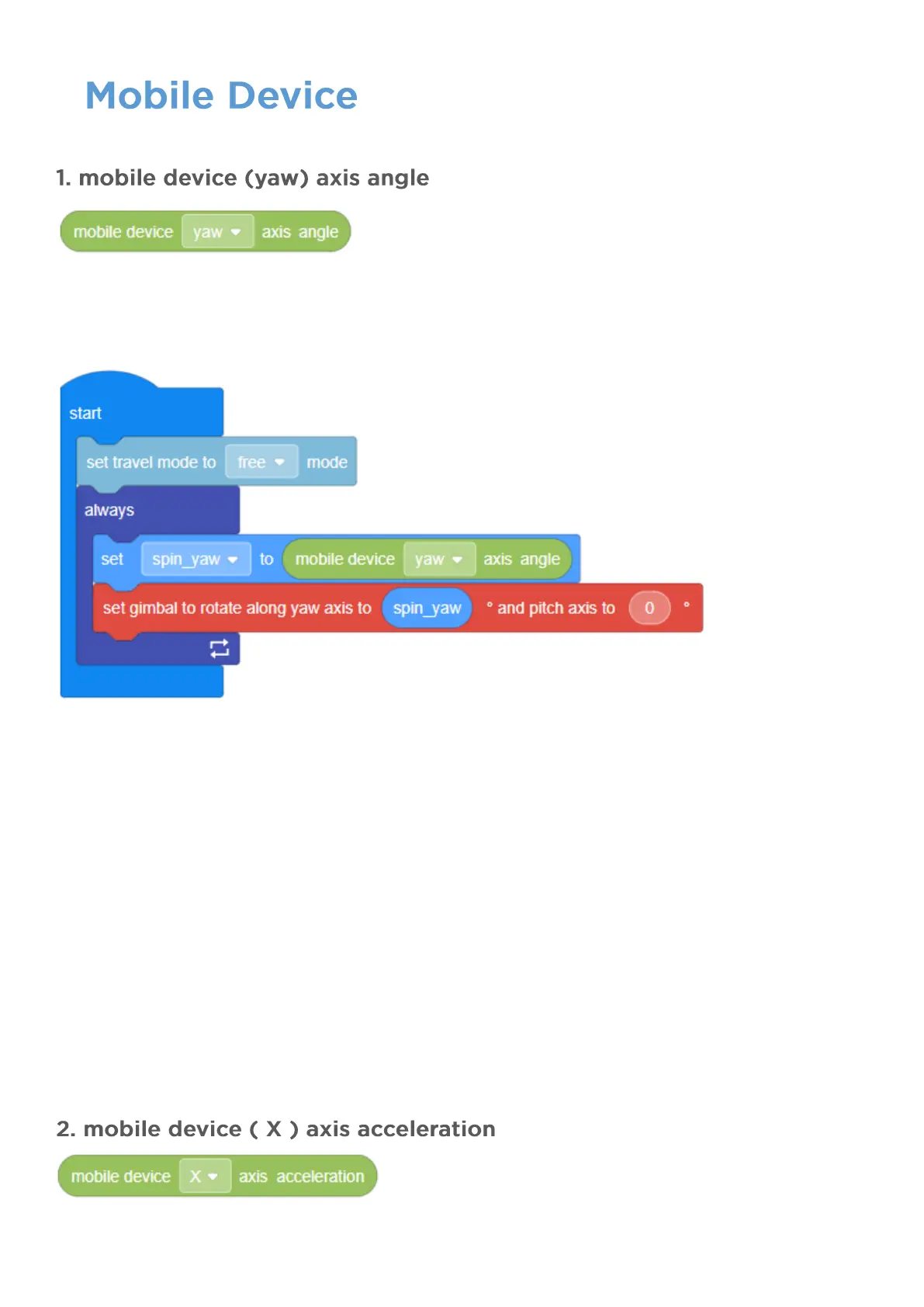
(1) Objective: Obtains the current angle value of a mobile device
(2) Type: Information block (variable-type)
(3) Example: Dynamic rotation control
Rotate the mobile device to the left or right and observe whether the EP’s gimbal rotates accordingly.
Note:
1) The EP defaults to Chassis Lead Mode. To control the gimbal separately you will need to first set the robot
to Free Mode.
2) Mobile device refers to devices such as smartphones and tablets.
3) The gesture angle for mobile devices ranges from approximately -180 to 180°.
For the yaw-axis: Motion to the right is positive (0-180)
For the pitch-axis: Upward motion is positive (0-180)
For the roll-axis: Motion downward and to the right is positive (0-180)
Python API:
Function: mobile_ctrl.get_attitude(attitude_enum)
Parameters:
● attitude_enum(enum):
■ rm_define.mobile_atti_pitch
■ rm_define.mobile_atti_roll
■ rm_define.mobile_atti_yaw