14
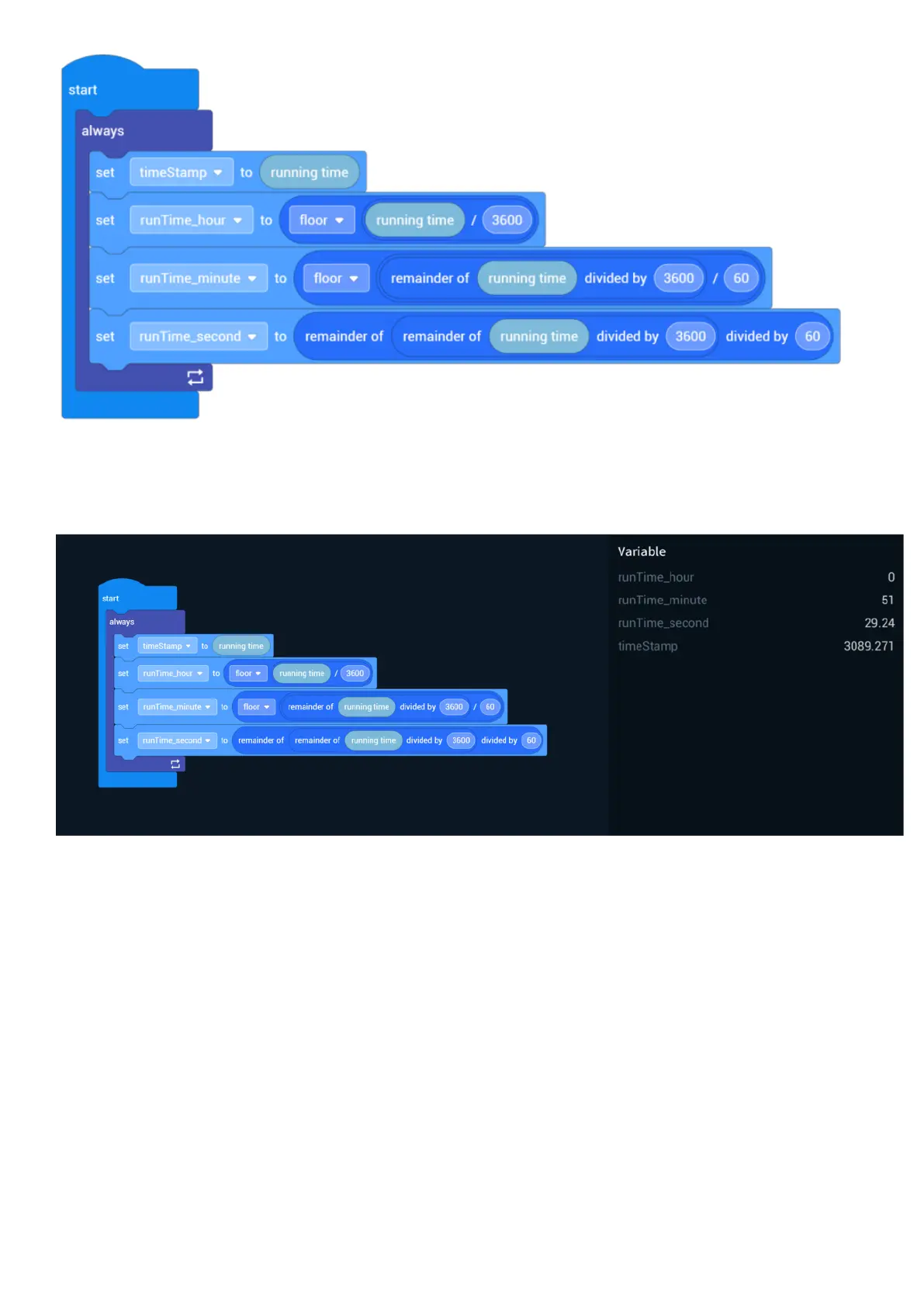
You can check data changes using the FPV window.
The robot will need to take a break when program runtime reaches one hour.
(i.e., when runTime_hour>1).
Note:
1) The start time refers to the time when the robot is powered on.
2) If the robot restarts after a power failure, it will recount the running time.
Python API:
Function: tools.get_unixtime()
Return value:
● time (float)