25
Python API:
Function: chassis_ctrl.enable_stick_overlay()
chassis_ctrl.disable_stick_overlay()
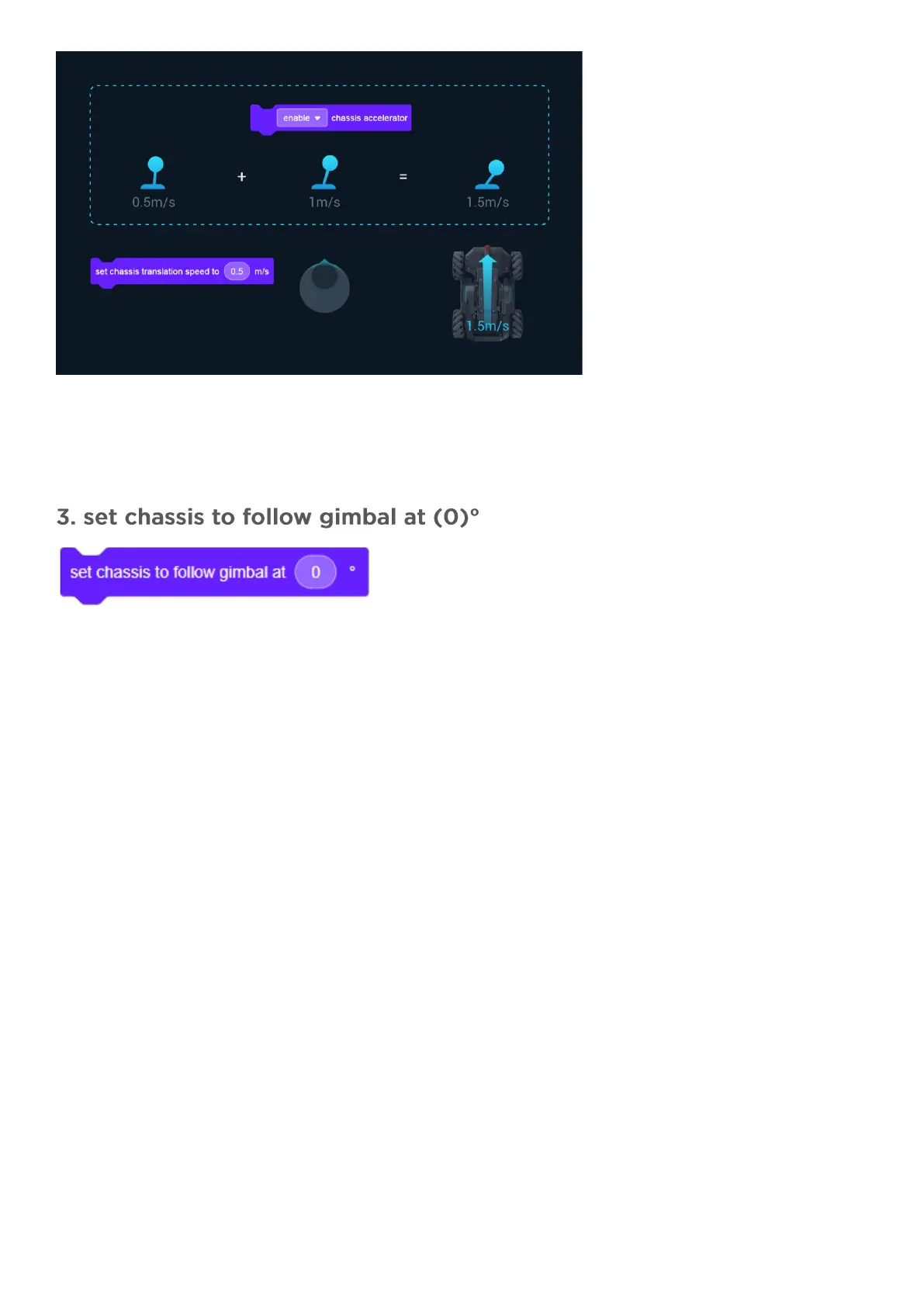
(1) Objective: In Gimbal Lead Mode, maintains a specific angle for the chassis relative to the movement of
the gimbal
(2) Type: Settings block
(3) Example: Gimbal Lead Mode
The angle between the chassis and the movement of the gimbal will increase at first, then eventually fall to
zero.