27
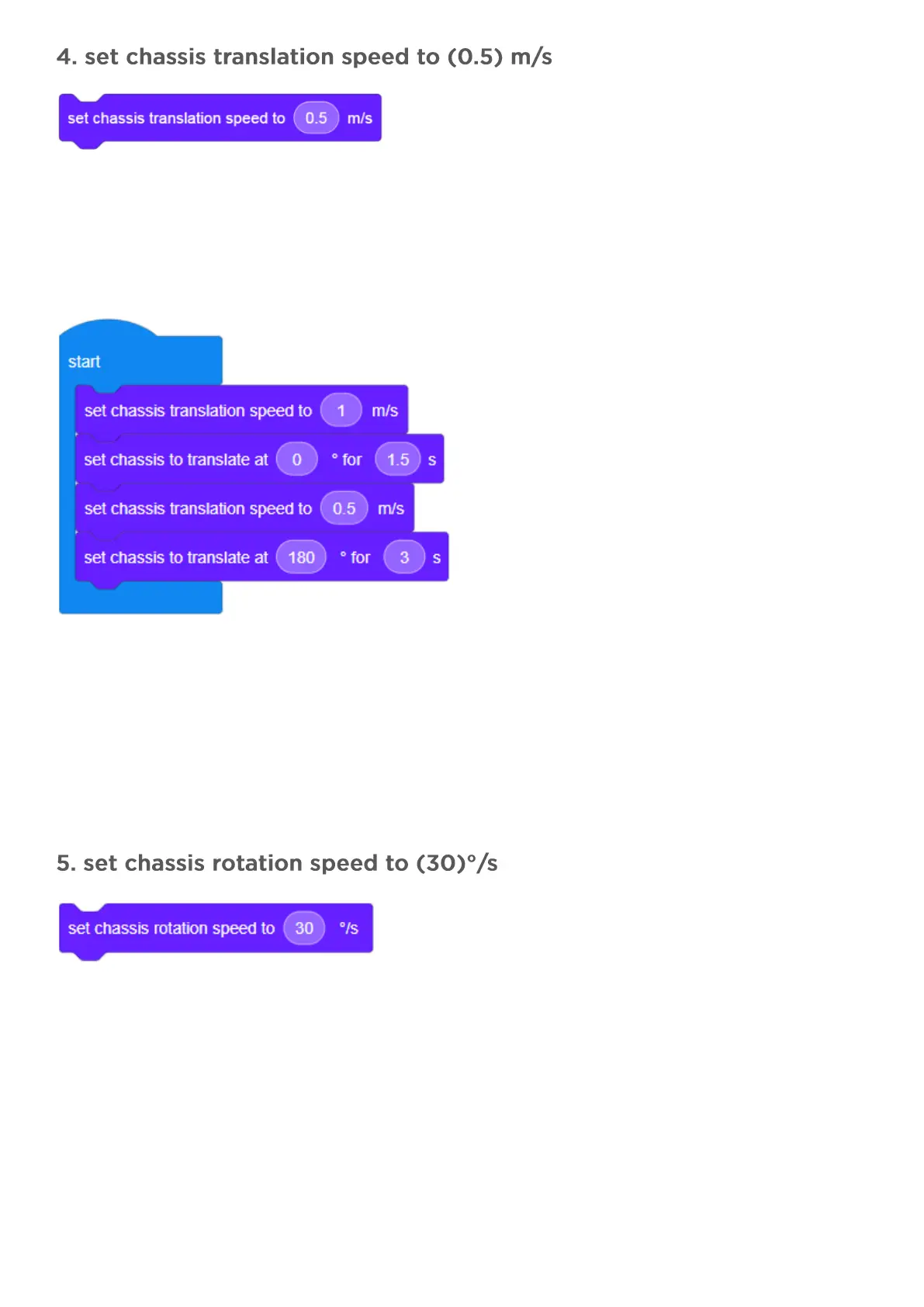
(1) Objective: Sets the default translation speed of the chassis to 0.5 m/s; the chassis will move faster when
set to a higher speed value.
(2) Type: Settings block
(3) Example: Reduce reversal speed
This will control the chassis to translate forward at 1 m/s for 1.5 seconds, then translate backwards at 0.5
m/s for three seconds to return to the starting point.
Note:
Please ensure there are no obstacles in the robot’s intended path before setting the chassis to a high
translation speed.
Python API:
Function: chassis_ctrl.set_trans_speed(speed)
Parameters:
● speed(float): [0, 3.5] m/s
(1) Objective: Sets the default rotation speed of the chassis to 30°/s; the chassis will rotate faster when set
to a higher rotation speed value.
(2) Type: Settings block
(3) Example: Set acceleration warning
As the warning LED color changes, the rotation of the chassis will accelerate.