30
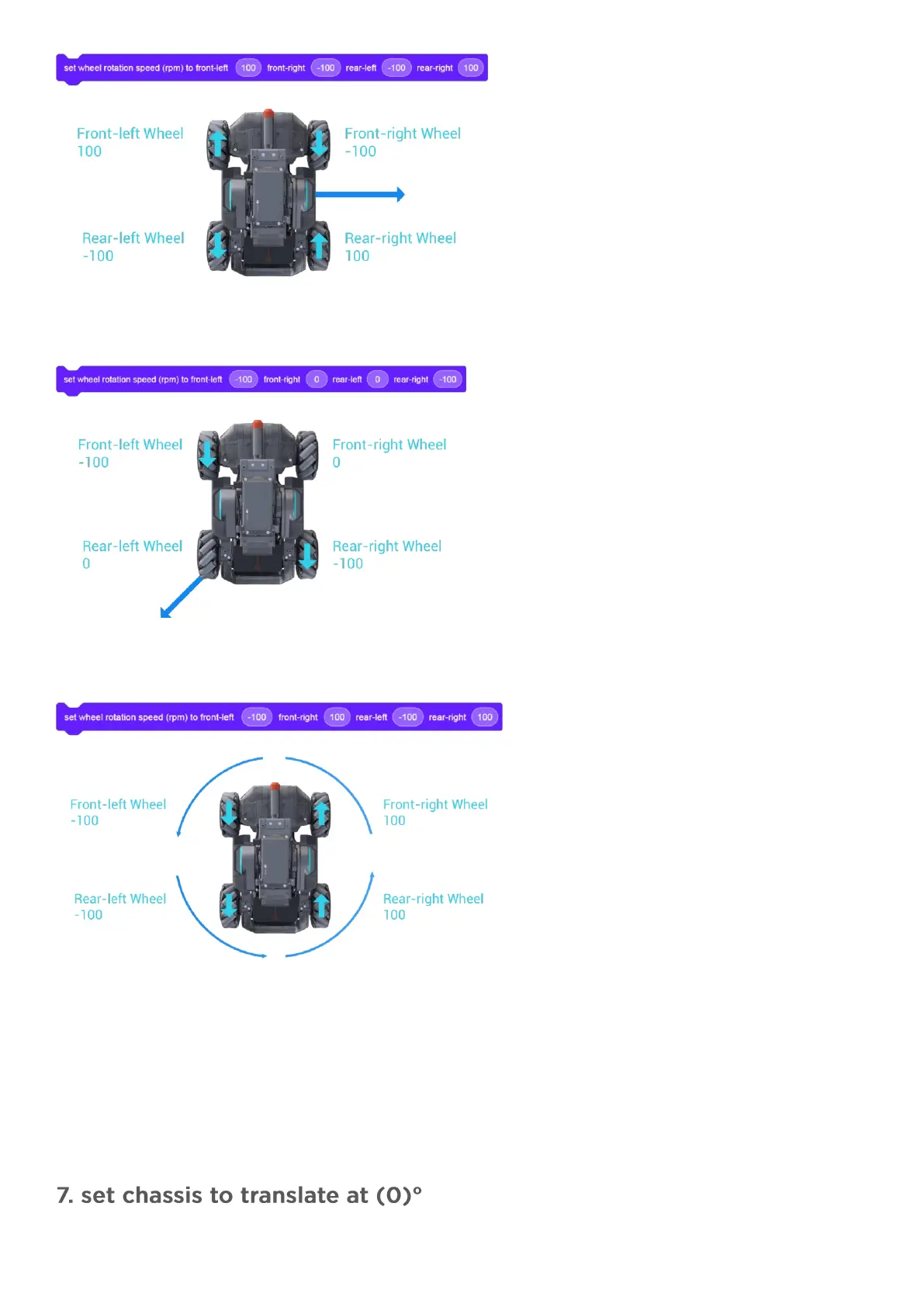
When the robot translates backward and to the left, the front-left wheel and the rear-right wheel will rotate
backward, so their rotation speed values should be negative, while the front-right wheel and the rear-left
wheel will stay still, so their rotation speed values should be zero.
When the robot rotates to the left, the front-right wheel and the rear-right wheel will rotate forward, so their
rotation speed values should be positive, while the front-left wheel and the rear-left wheel will rotate
backwards, so their rotation speed values should be negative.
Python API:
Function: chassis_ctrl.set_wheel_speed(lf_speed, rf_speed, lr_speed, rr_speed)
Parameters:
● lf_speed(int): [-1000, 1000] rpm
● rf_speed(int): [-1000, 1000] rpm
● lr_speed(int): [-1000, 1000] rpm
● rr_speed(int): [-1000, 1000] rpm