31
(1) Objective: Sets the chassis to translate in a specified direction
(2) Type: Execution block
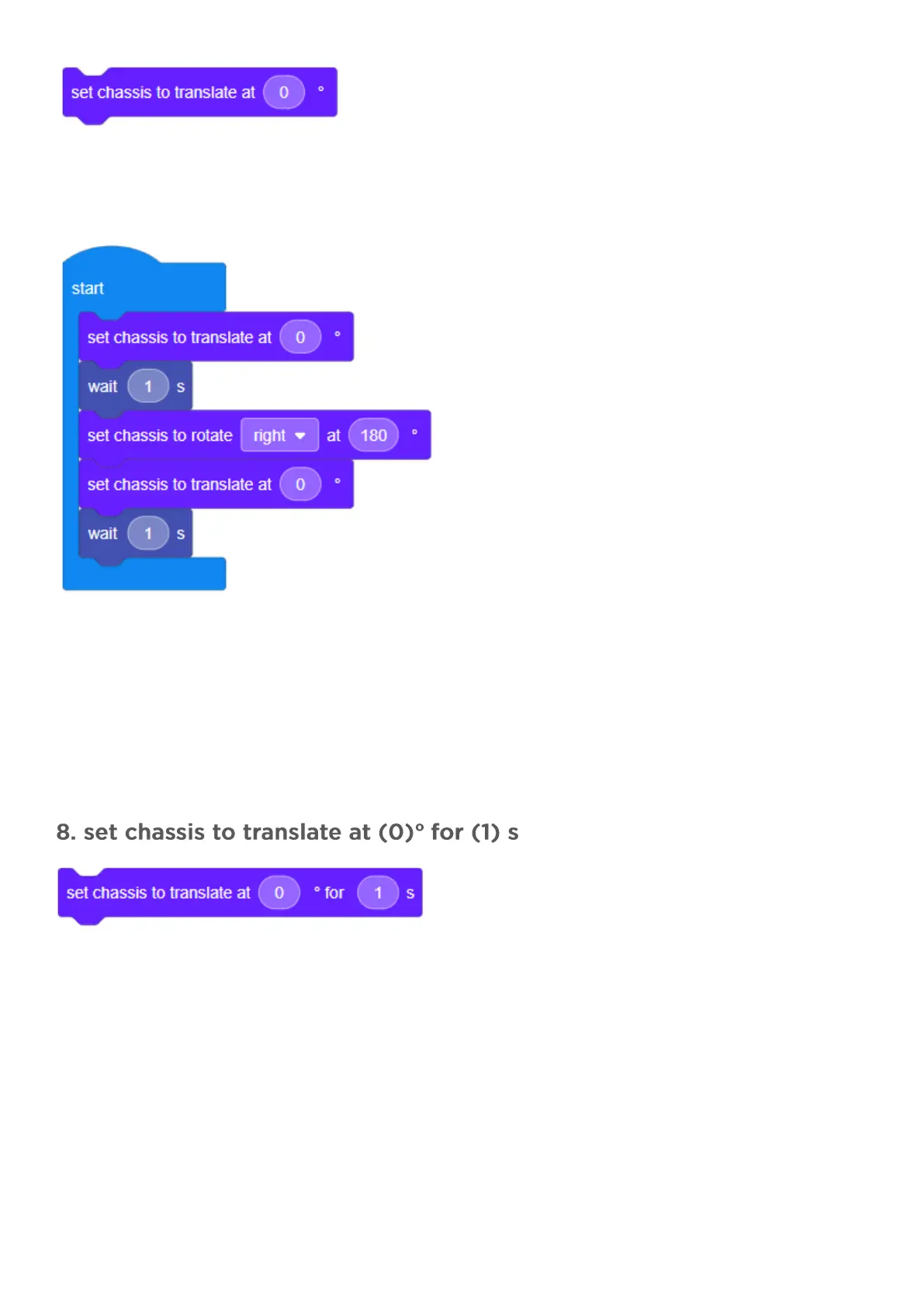
(3) Example: Make a round trip
This will control the EP to translate forward for one second, then turn around and return to the starting point.
Note:
This block will control the chassis to continuously translate in a specified direction until the robot receives a
“set chassis to stop moving,” ”wait (1) s,“ or other command that controls it to stop.
Python API:
Function: chassis_ctrl.move(degree)
Parameters:
● degree (int): [-180, 180] °
(1) Objective: Sets the duration of time the chassis will translate in a specified direction
(2) Type: Execution block
(3) Example: Translate in an X-pattern
This will control the robot to translate to the right, forward-left, right, and backward-left in an X-shaped
sequence.