32
Python API:
Function: chassis_ctrl.move_with_time(degree, time)
Parameters:
● degree(int): [-180, 180] °
● time(float): [0, 20] s
(1) Objective: Sets the distance the chassis will translate in a specified direction
(2) Type: Execution block
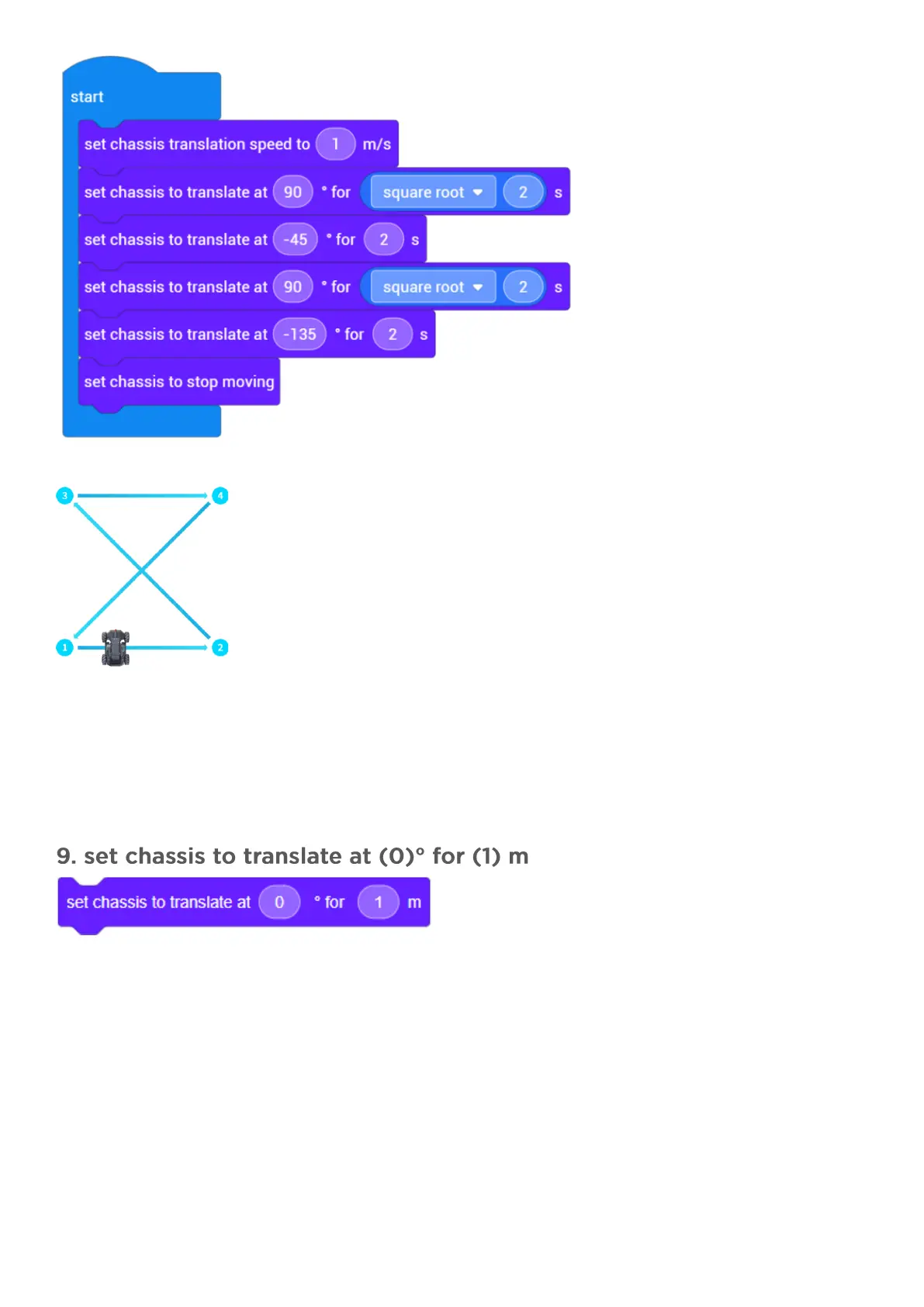
(3) Example: Translate in a cross-pattern
This will control the robot to translate forward, backward, left and right in a cross-shaped sequence.