35
Note:
1) This block is not available in Gimbal Lead Mode.
2) Be sure there are no obstacles around the robot before setting a high chassis rotation speed.
3) This block will set the chassis to rotate constantly in a specified direction until it receives a “set chassis to
stop moving”,“wait (1) s” or other command that causes it to stop.
Python API:
Function: chassis_ctrl.rotate(direction_enum)
Parameters:
● direction_enum(enum):
■ rm_define.clockwise
■ rm_define.anticlockwise
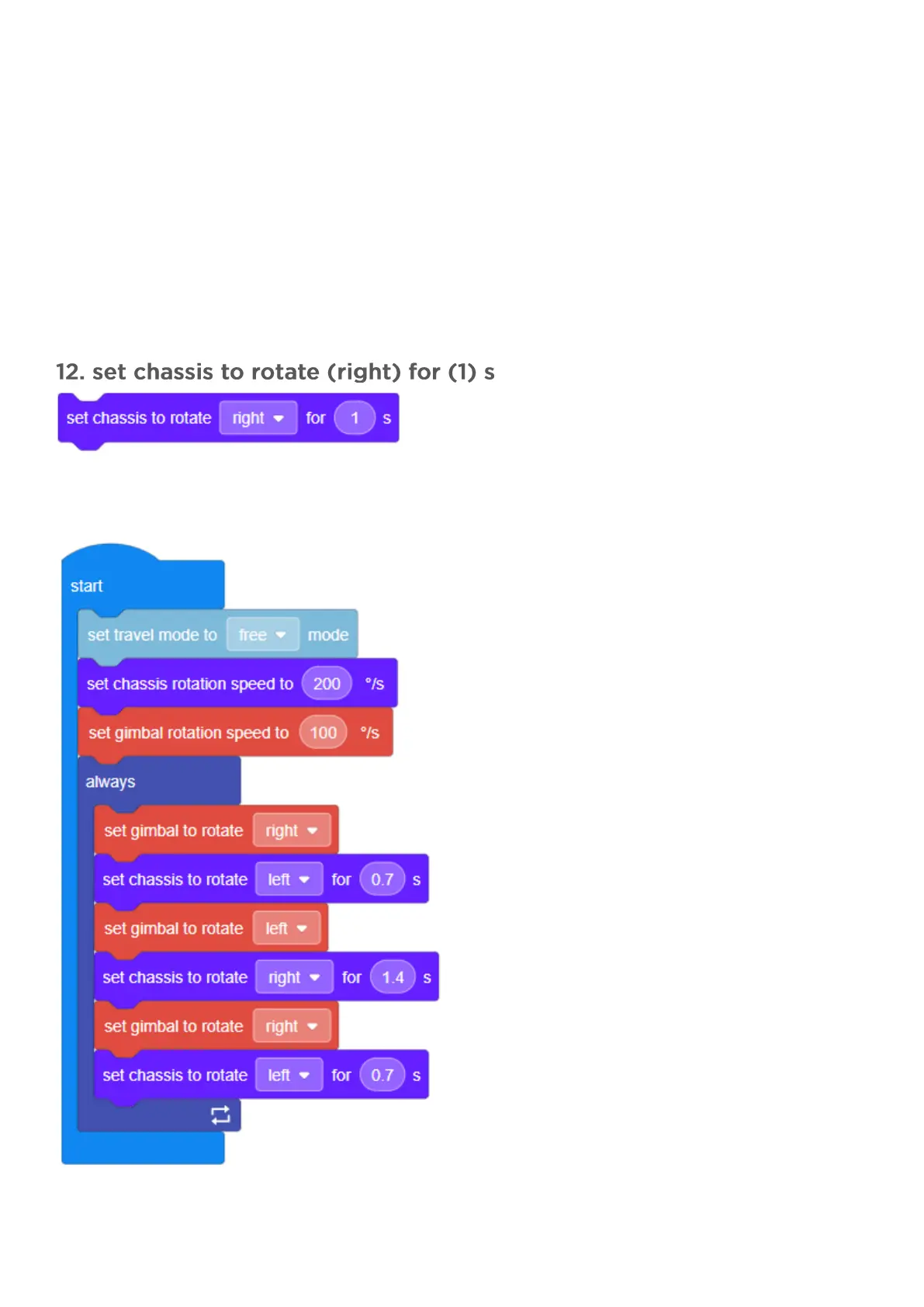
(1) Objective: Sets the duration the chassis will rotate in a specified direction
(2) Type: Execution block
(3) Example: Cross-rotate the gimbal and chassis
Note: