36
This block is not available in Gimbal Lead Mode.
Python API:
Function: chassis_ctrl.rotate_with_time(direction_enum, time)
Parameters:
● direction_enum(enum):
■ rm_define.clockwise
■ rm_define.anticlockwise
● time(float): [0, 20] s
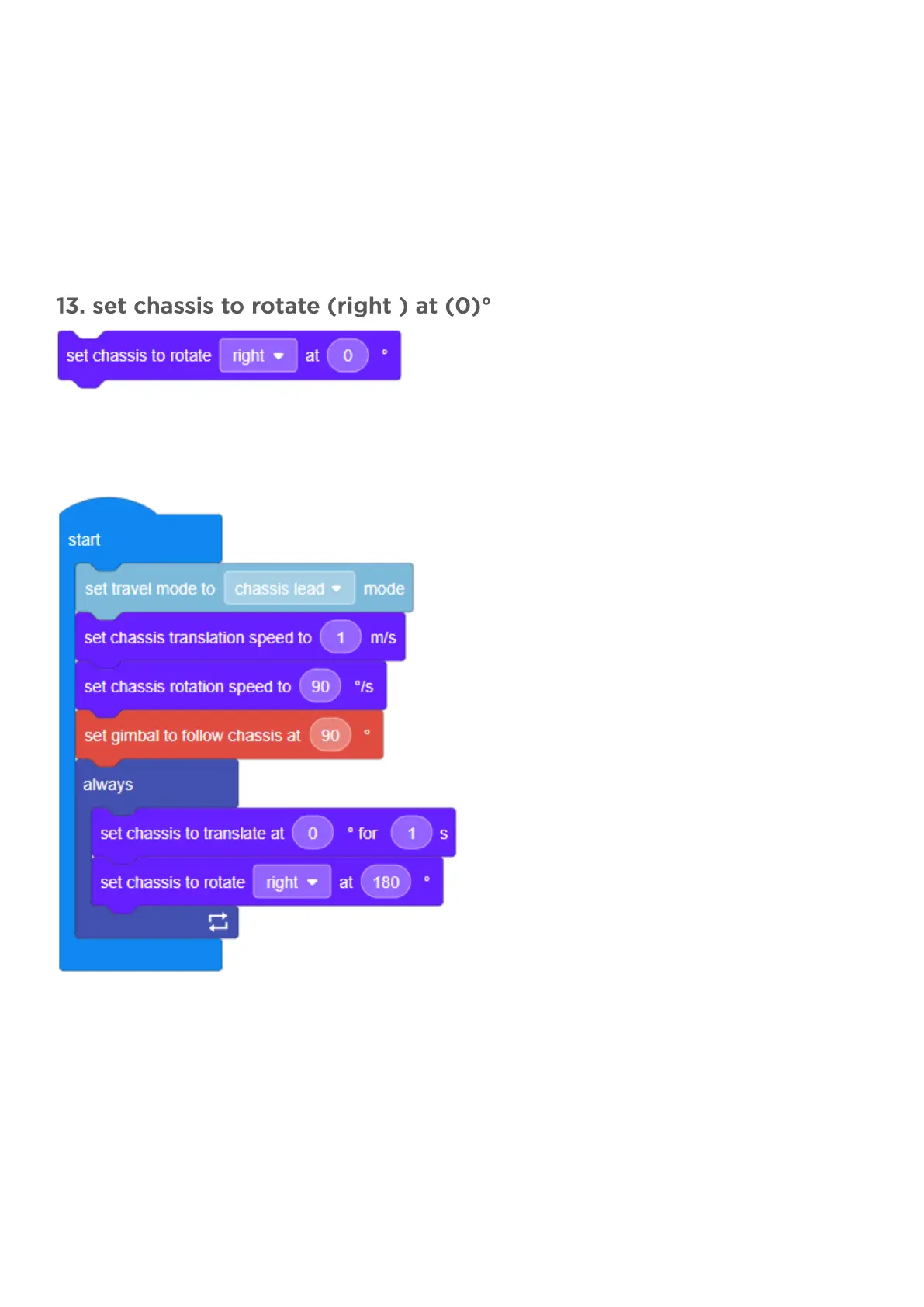
(1) Objective: Sets the angle and direction of chassis rotation
(2) Type: Execution block
(3) Example: Translate continuously back and forth This sets the EP to translate back and forth continuously
with the gimbal directed outward.
Note:
This block is not available in Gimbal Lead Mode.
Python API:
Function: chassis_ctrl.rotate_with_degree(direction_enum, degree)
Parameters:
● direction_enum(enum):
■ rm_define.clockwise
■ rm_define.anticlockwise
● degree(int): [0, 1800] °