41
Python API:
Function: chassis_ctrl.get_attitude(attitude_enum)
Parameters:
● attitude_enum(enum):
■rm_define.chassis_yaw
■rm_define.chassis_pitch
■rm_define.chassis_roll
Return value:
● degree(float)
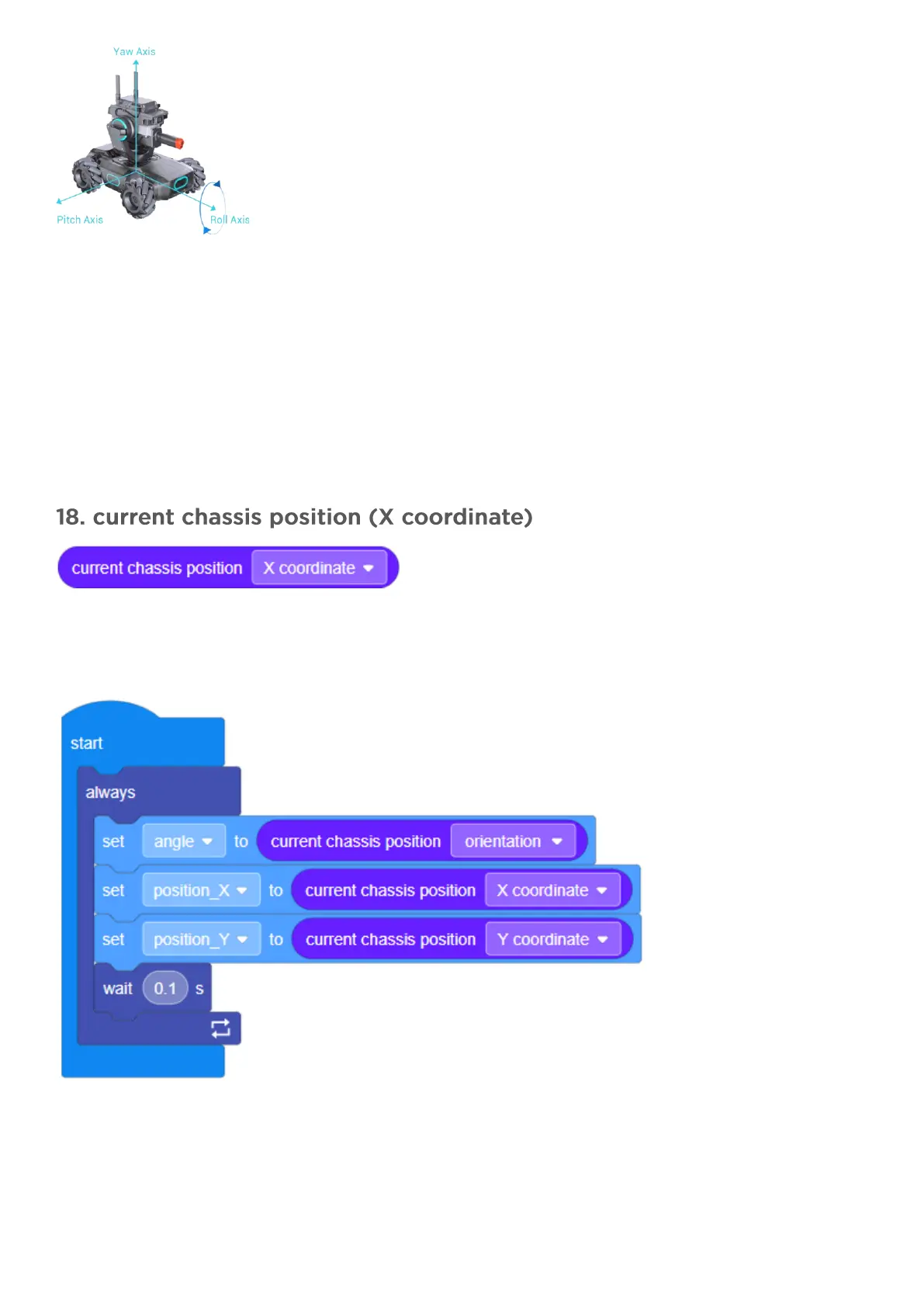
(1) Objective: Obtains the current location coordinates and orientation of the chassis
(2) Type: Information block (variable-type)
(3) Example: Obtain current position information This enables you to check numerical data for the current
chassis position by manually pushing the robot back and forth or turning it left and right.
You can observe numerical changes using the FPV interface.