42
Note:
Because the chassis is under closed-loop control, it is normal to feel some resistance when moving the robot
manually.
Python API:
Function: chassis_ctrl.get_position_based_power_on(action_enum)
Parameters:
● action_enum(enum):
■ rm_define.chassis_forward
■ rm_define.chassis_translation
■ rm_define.chassis_rotate
Return value:
● position(float)
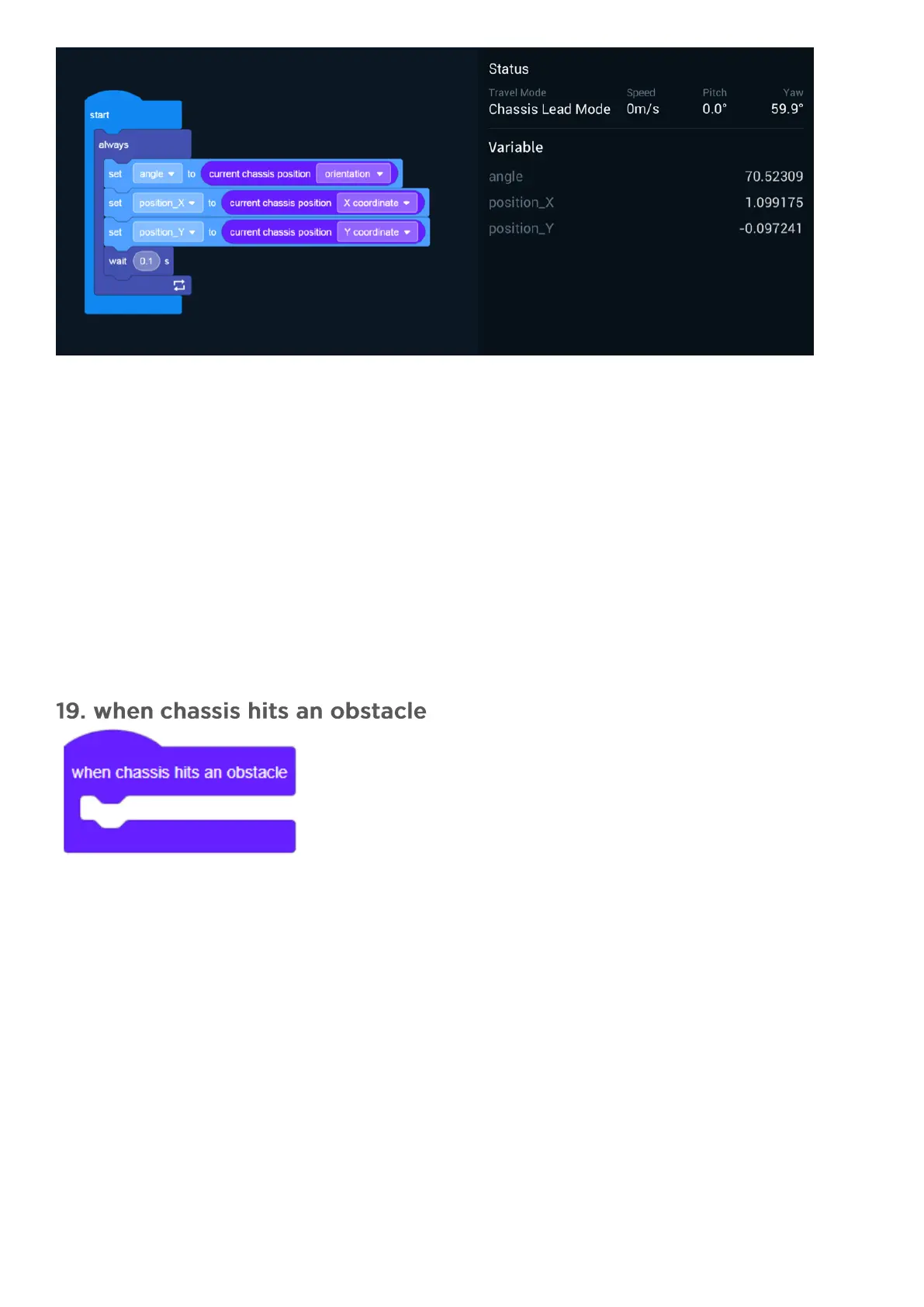
(1) Objective: Runs the program for the corresponding block when the chassis hits an obstacle while driving
(2) Type: Event block
(3) Example: Self-defend
This enables the self-defense mechanism to activate when the chassis impacts an obstacle, causing the robot
to retreat and stop running the block.