46
(2) Type: Settings block
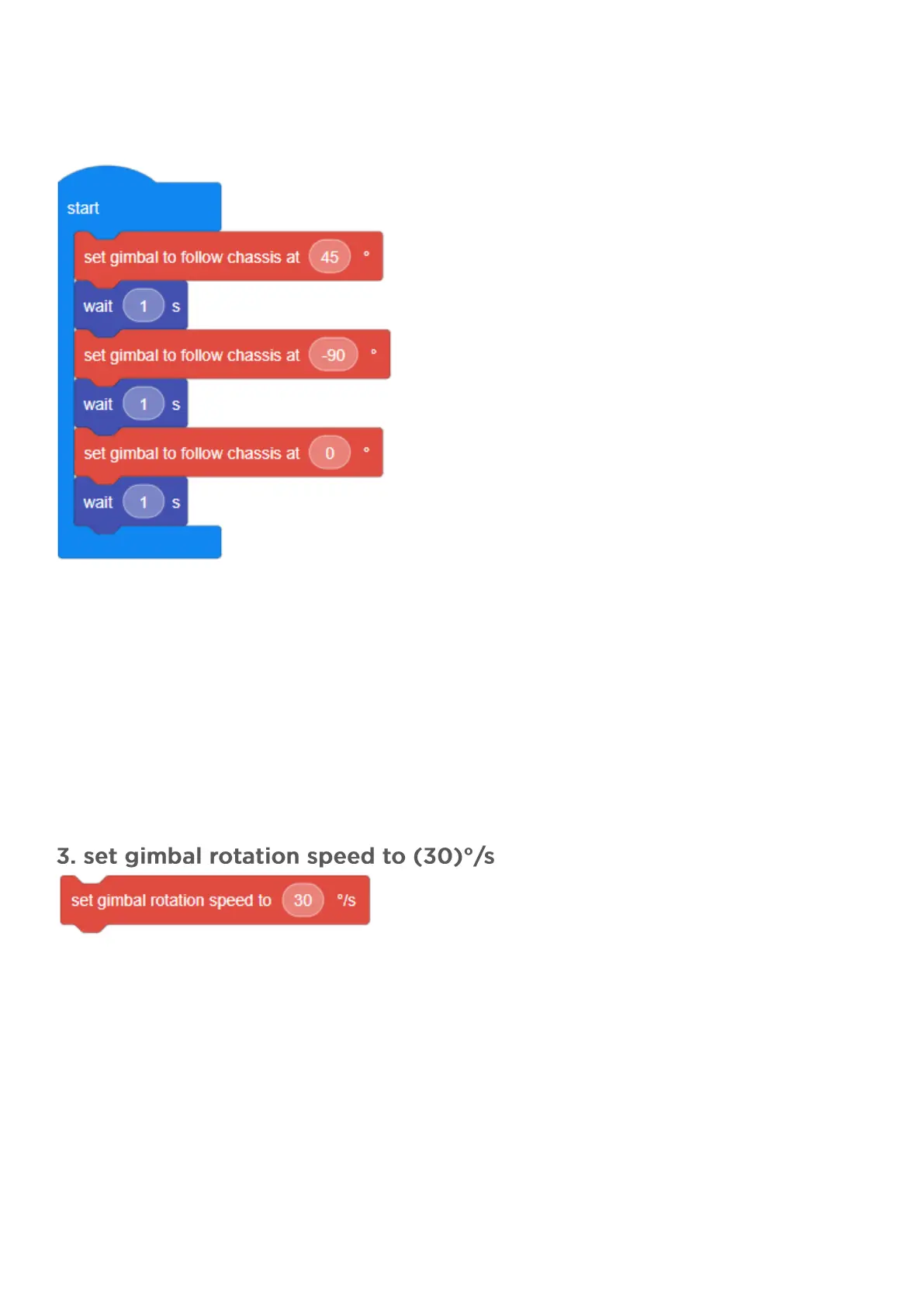
(3) Example: Chassis Lead Mode
This will set the gimbal to turn 45 degrees clockwise, and then 90 degrees counterclockwise before returning
to the center when the chassis is stationary.
Note:
1)This block is not available in Gimbal Lead Mode or Free Mode.
2) A zero-degree angle indicates that the gimbal and chassis are translating in the same direction along the
yaw axis.
3) This is an alternative way to control the gimbal’s to left and right rotation.
Python API:
Function: gimbal_ctrl.set_follow_chassis_offset(degree)
Parameters:
● degree(int): [-180, 180] °
(1) Objective: Sets default gimbal rotation speed to 30°/s; the higher the value, the quicker the rotation
(2) Type: Settings block
(3) Example: Rotate with variable speeds This will set the chassis to rotate clockwise with the gimbal as it
gradually increases its speed.