47
Note:
Before increasing the gimbal’s rotation speed, ensure that there are no obstacles near the robot.
Python API:
Function: gimbal_ctrl.set_rotate_speed(speed)
Parameters:
● speed(float): [0, 540] °/s
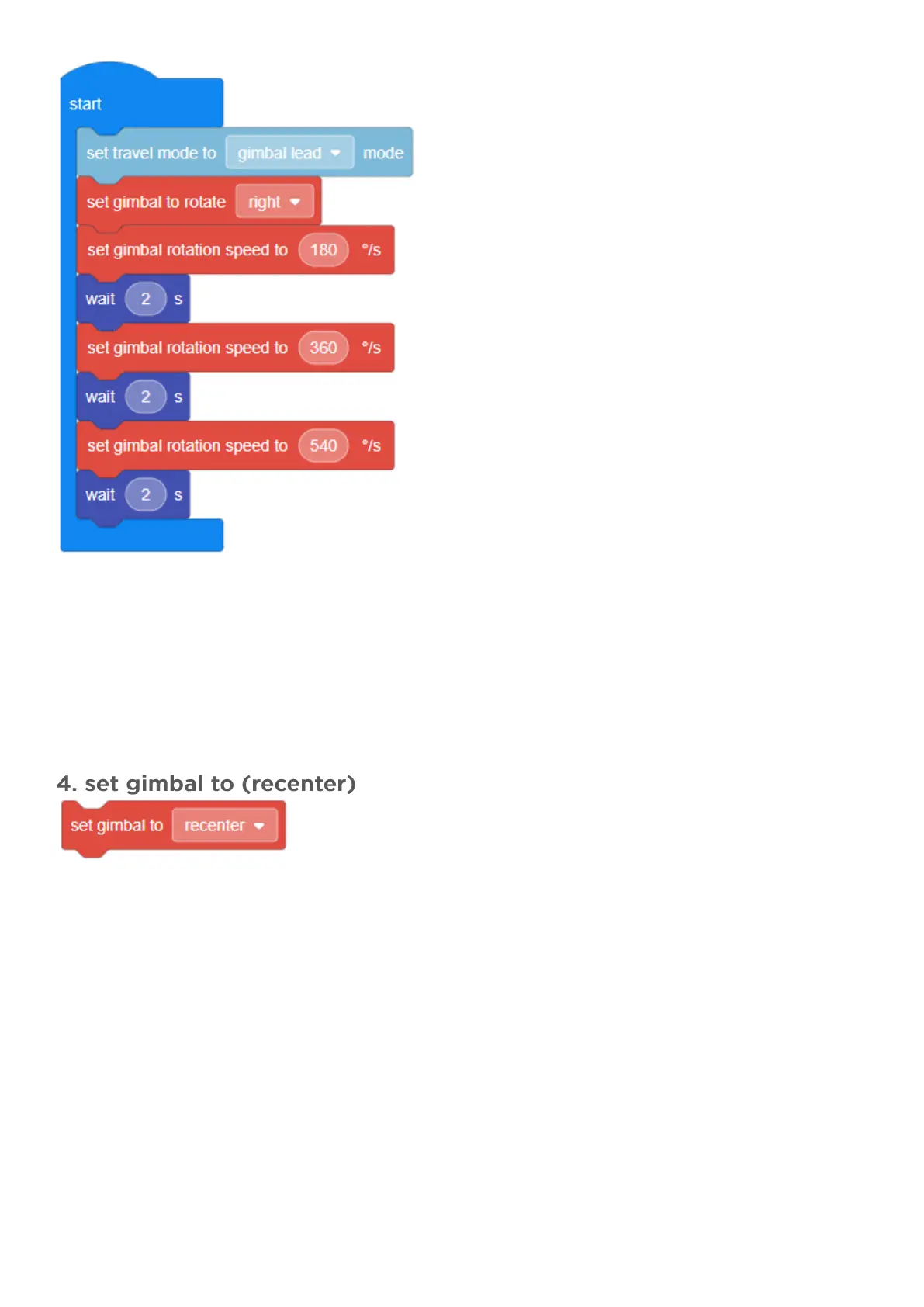
(1) Objective: Sets gimbal movements
● Recenter: The gimbal will return to its original position along the pitch axis and yaw axis.
● Stop: The gimbal will stop translating but can still be controlled.
● Sleep: The gimbal will go to sleep.
● Wake: The gimbal will power on again.
(2) Type: Execution block
(3) Example: Wake gimbal up, Hovering
① Wake gimbal up
In Sleep Mode, there is no power from the motor, so the gimbal can be translated freely by hand. When the
gimbal wakes up, it will power on again and rotate to its designated position before returning to center.