54
Note:
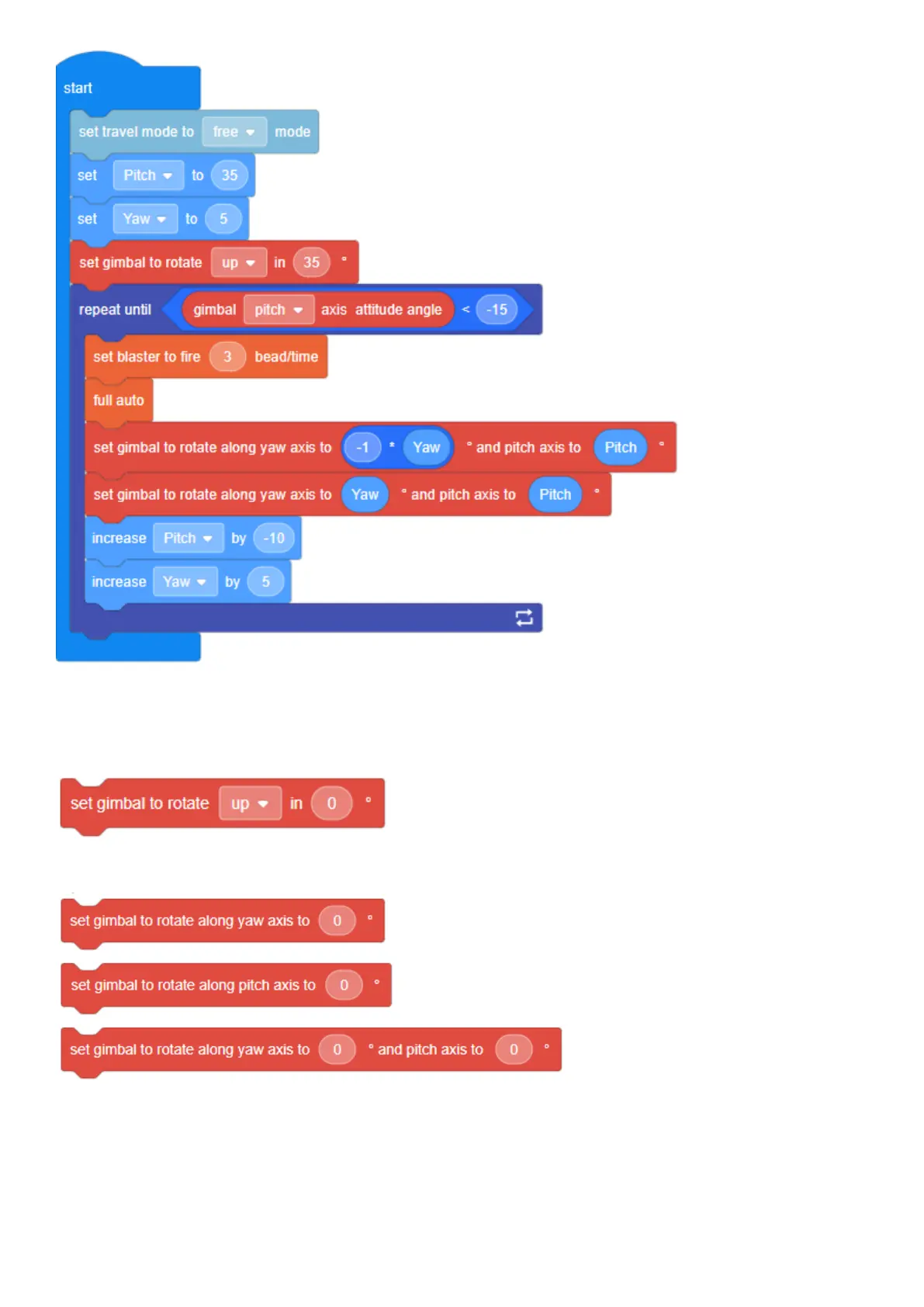
1)In Chassis Lead Mode, the “set gimbal to rotate along pitch axis to (0)°” block is available but the “set gimbal
to rotate along yaw axis to (0)°” block is not.
2)
”set gimbal to rotate (up) in (0)°” refers to the position relative to the gimbal’s current position.
3)
“set gimbal to rotate along yaw axis to (0)°”、“set gimbal to rotate along pitch axis to (0)°”、“set gimbal to
rotate along yaw axis to (0)°, and pitch axis to (0)°” refers to the absolute position based on the chassis’
current location.
Python API: