55
Function: gimbal_ctrl.angle_ctrl(yaw_degree, pitch_degree)
Parameters:
● yaw_degree (int): [-250, 250]°
● pitch_degree (int): [-20, 35]°
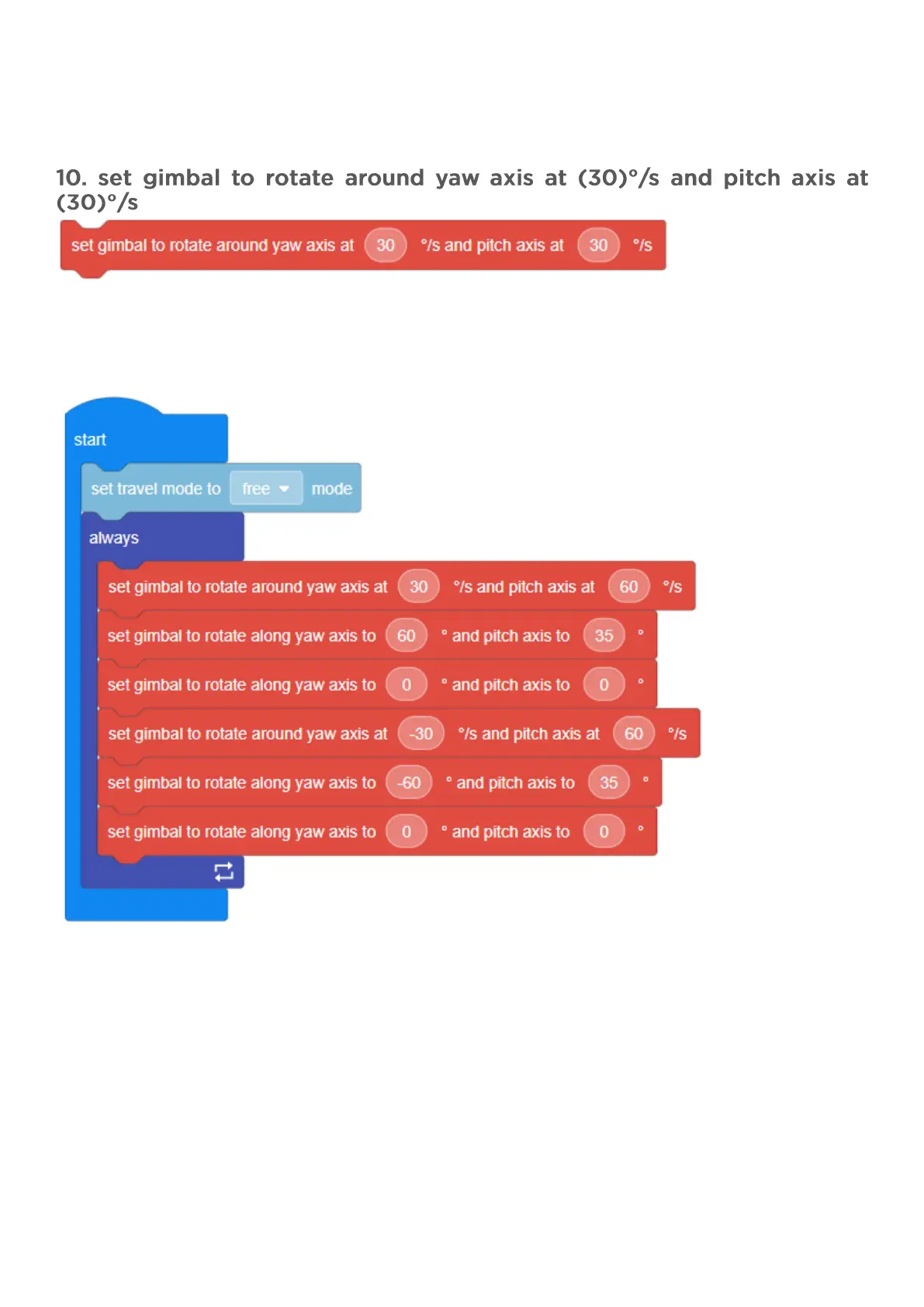
(1) Objective: Sets the gimbal to rotate on its yaw and pitch axis simultaneously at a specified rotation
speed
(2) Type: Execution block
(3) Example: Flexible neck rotation
Note:
The value of the rotation speed represents the gimbal’s rotation direction.
At the yaw axis, a positive value indicates right rotation, and a negative value indicates left rotation.
At the pitch axis, a positive value indicates upward rotation, and a negative value indicates downward
rotation.
Python API:
Function: gimbal_ctrl.rotate_with_speed(yaw_speed, pitch_speed)
Parameters:
● yaw_speed(float): [-360, 360]°/s
● pitch_speed(float): [-360, 360]°/s