56
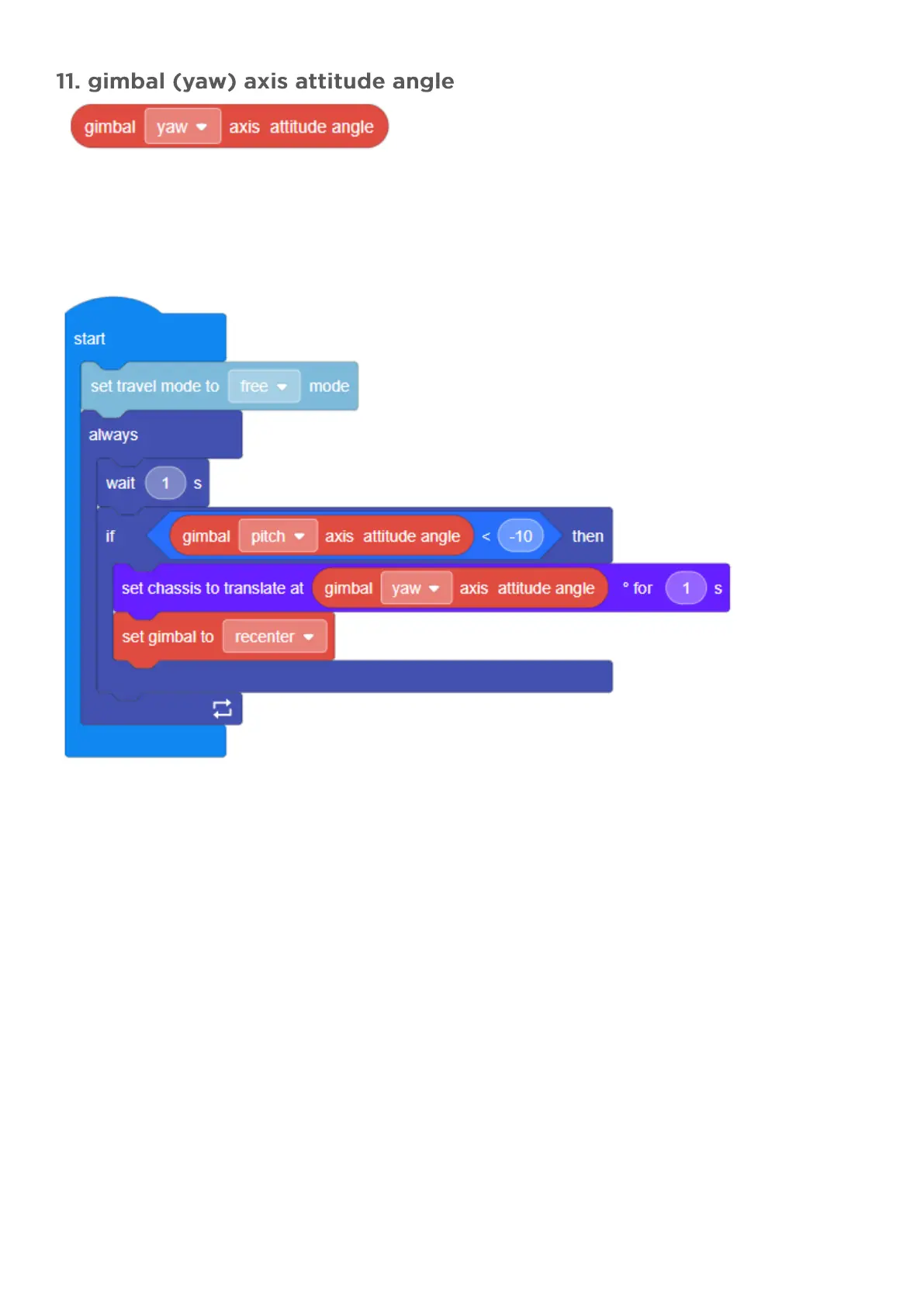
(1) Objective: Obtains the current attitude angle for the gimbal along its current yaw or pitch axes
(2) Type: Information block (variable-type)
(3) Example: Translate in the gimbal’s direction
This will set the gimbal to aim towards a specific direction. The robot will translate towards the specified
direction for one second after the gimbal is pressed.
Python API:
Function: gimbal_ctrl.get_axis_angle(axis_enum)
Parameters:
● axis_enum (enum):
■ rm_define.gimbal_axis_yaw
■ rm_define.gimbal_axis_pitch
Return value:
● degree(int)