69
(1) Description: Control and move the robotic arm to a specified position. The front and back direction along
the body is X while the vertical direction along the body is Y. The unit is millimeter.
(2) Type: Execution
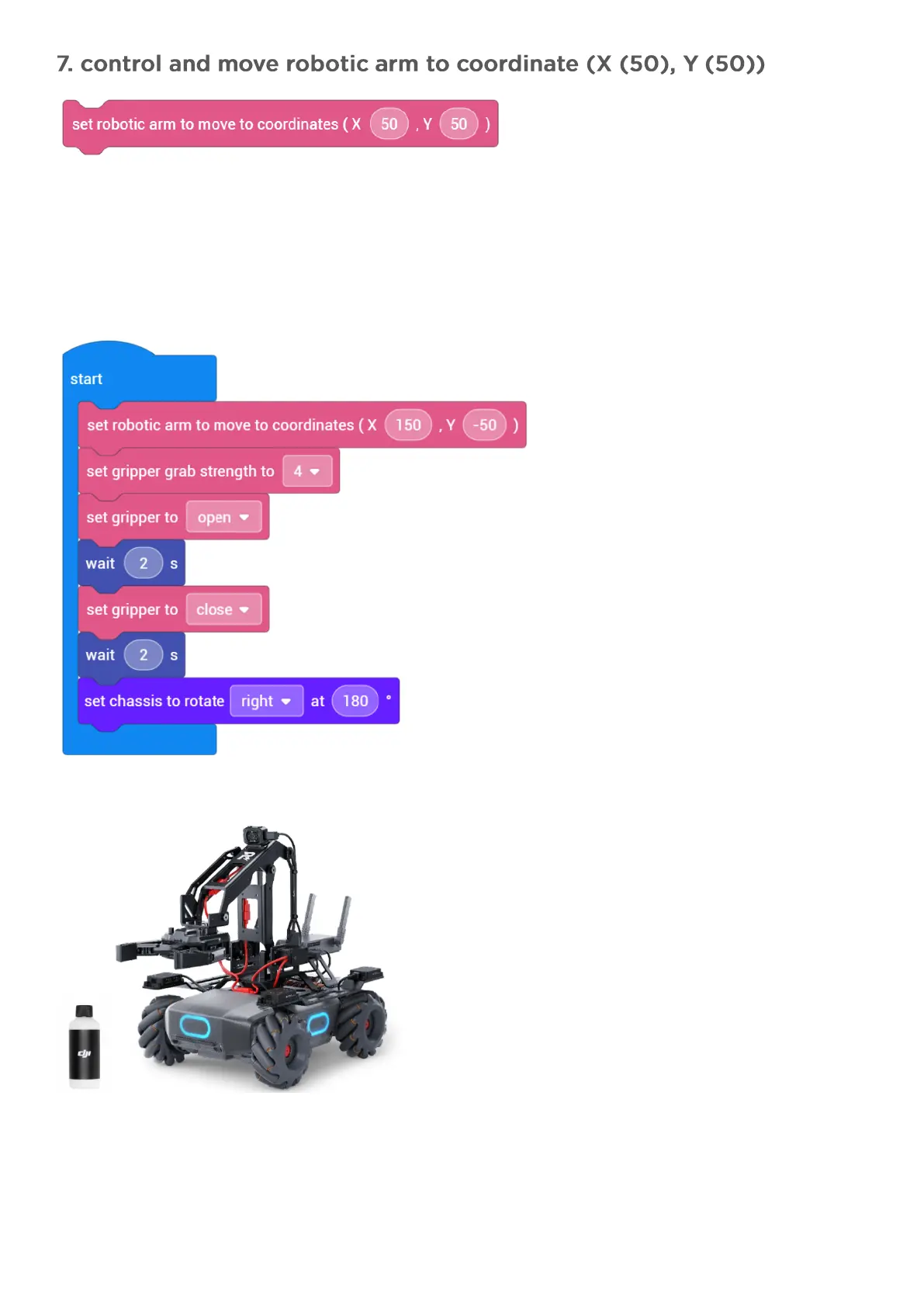
(3) Example: Grasp objects
Place a water bottle in front of the robot and control the robotic arm so that it can accurately reach the target
position. After that, use the gripper to grasp the bottle then finally turn the robot around.
Note:
1) Mark the origin when connecting the robotic arm and proceed according to the instructions in the
manual.
2) Flexibly control the robotic arm, the gripper, and the mobile chassis so that the robot can grasp, lift,
transfer, and deliver objects.