70
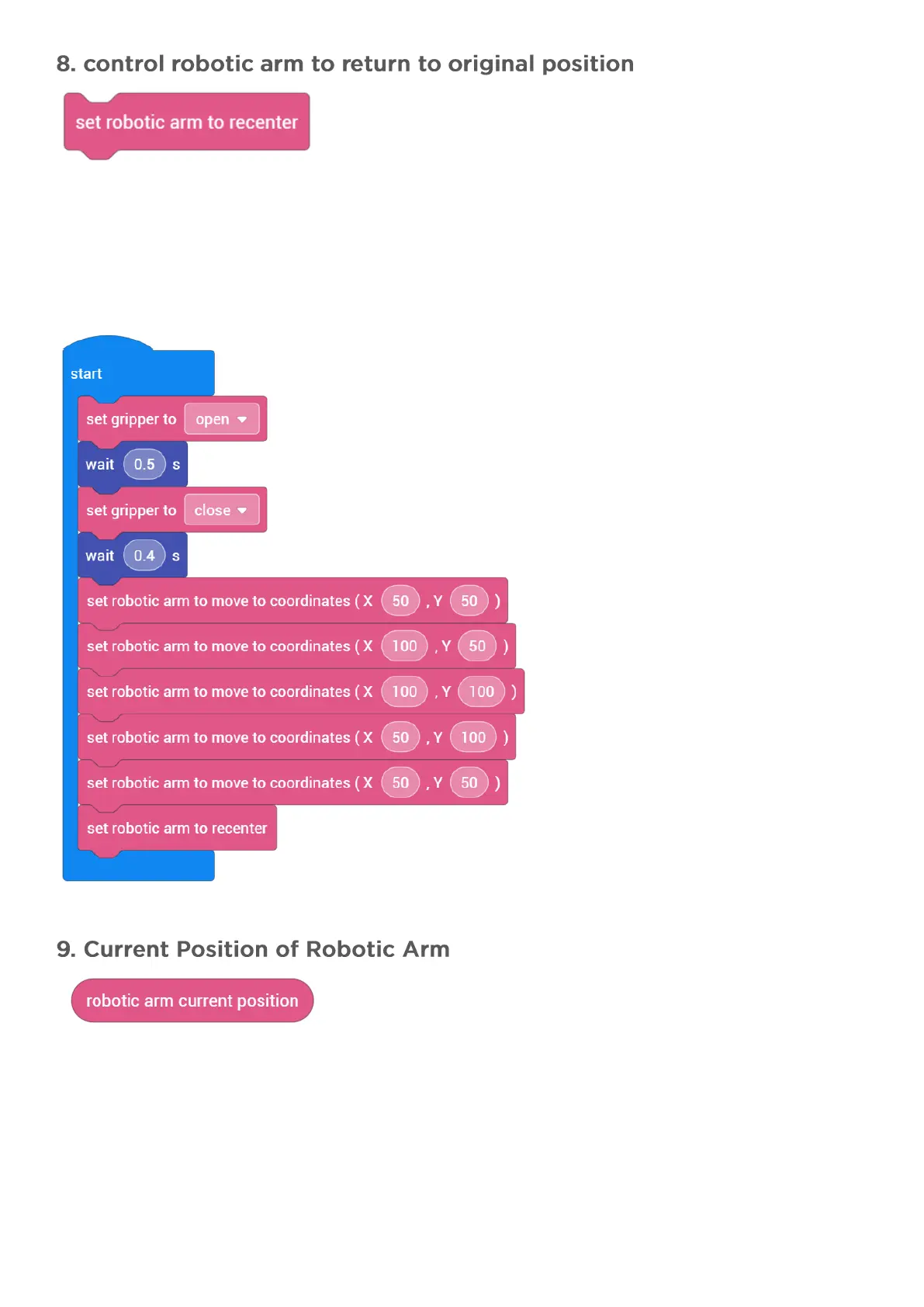
(1) Description: Control the robotic arm so that it can return to the original position, which is (0, 0) of the
body coordinate system.
(2) Type: Execution
(3) Example: Draw a square
Control the gripper to grip a writing brush and draw a square by moving the robotic arm and then return to
the original position.
(1) Description: Obtain the current position of the robotic arm. The position parameter is (x(abscissa),
y(ordinate)). The unit is millimeter.
(2) Type: Execution
(3) Example: Control the robotic arm to return it to the original position
Control the robotic arm to return to the original position through calculating the difference between the
current coordinate and the origin.