93
3 claps.
Python API:
Function: vision_ctrl.cond_wait(condition_enum)
Parameters:
● condition_enum(enum):
■ rm_define.cond_sound_recognized_applause_twice
■ rm_define.cond_sound_recognized_applause_thrice
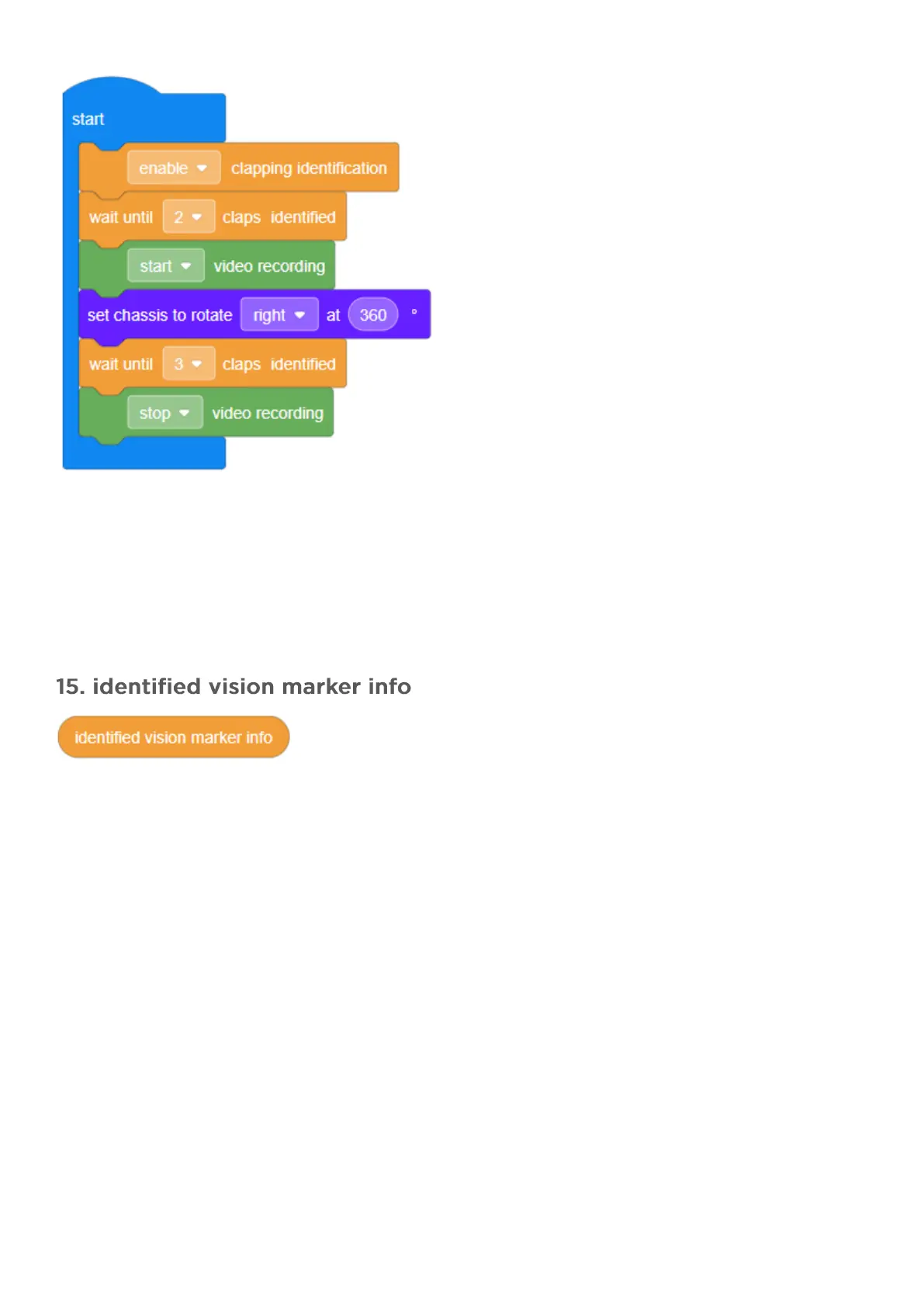
(1) Objective: Obtains information for an identified Vision Marker, returned as N,ID,X,Y,W,and H parameters.
(2) Type: Information block (list-type data)
(3) Example: Recognize Vision Markers
When a Vision Marker appears in the robot’s field of view, you will be able to observe Vision Marker
parameters in the FPV page. You can move the Vision Marker to observe changes to any of the 6 parameters.