95
ID=4: left arrow
ID=5: right arrow
ID=6: forward arrow
ID=8: red heart
ID=10-19: 0-9
ID=20-45: A-Z
Python API:
Function: vision_ctrl.get_marker_detection_info()
Return value:
● detection_info(list)
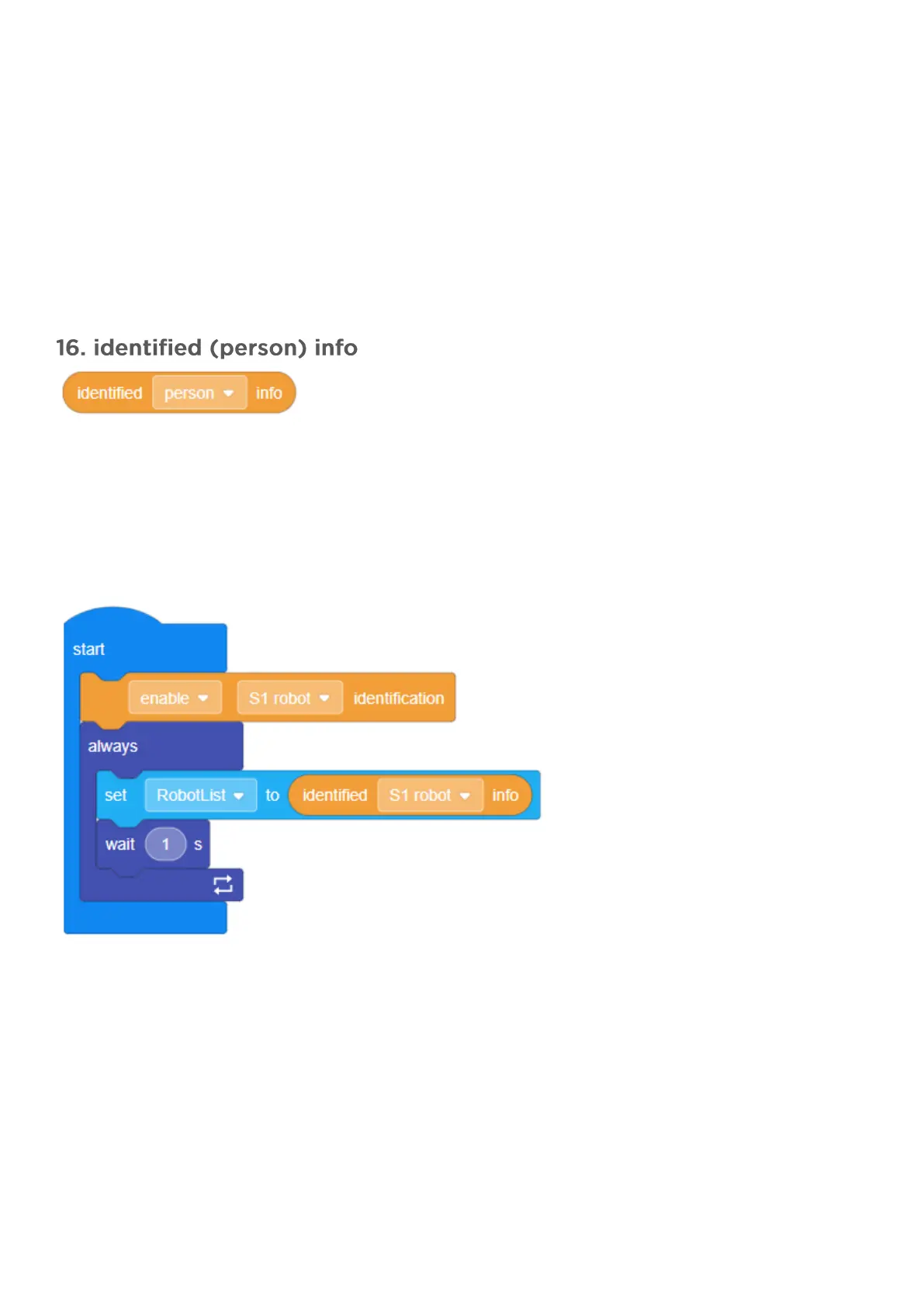
(1) Objective: Obtains an identified person or robot’s information in terms of the parameters N, X, Y, W, and
H
(2) Type: Information acquisition block (list-type data)
(3) Example: Identify another S1 robot
When another S1 robot appears in the robot’s field of view, information about the robot will display in the
FPV window. You can move the other robot within your robot’s field of view and observe how these 5 values
change.
You can observe data changes using the FPV window: