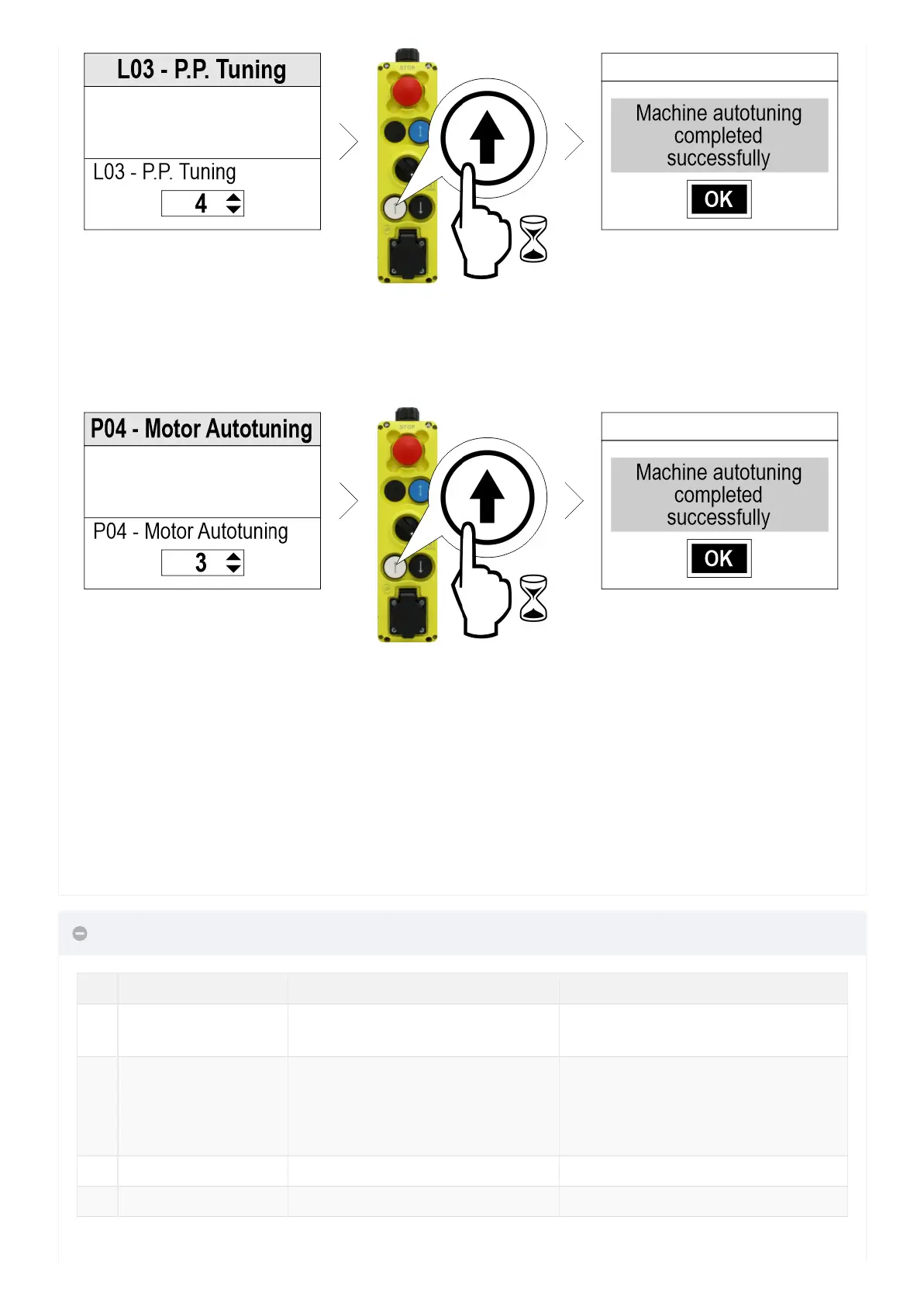
Select 4 : Static Tuning
Select 5 : Dynamic tuning (only if free from ropes)
GEARED motor:
Select 3
In case of any problem go to the Fault menu to identify the Problem (§ Motor Tuning Errors)
At the end of the procedure, press the up/down button and check the correct elevator car movement direction; if not
correct, invert values of parameters E98 and E99.
For closed loop installations, in the <I/O Status>, VVVF IN/OUT menu, check that the VVVF motor encoder value
(4/7) is positive (+) during upward movement and negative (-) during downward movement when the FWD (1/7)
command is activated. If not, invert a channel in the motor encoder of the VVVF.
L01 A/B Output channel Absolute Signal Note
0 None
Choice is not possible because for
Asynchronous motors
1
12/15V
Complementary;
12/15V Open Collector;
5V Line Driver
Z
For Encoder 5V Line Driver required
optional board OPC-LM1-IL
2 5V Line Driver 3 bit code (segnale U, V, W) Required optional board OPC-LM1-PP
3 5V Line Driver 4 bit gray code Required optional board OPC-LM1-PP
 Loading...
Loading...