Chapter 13 Hand Wheel Mode
1-5
M-Series PLC Motion User Manual
12-3 Description of Test Run Position Control
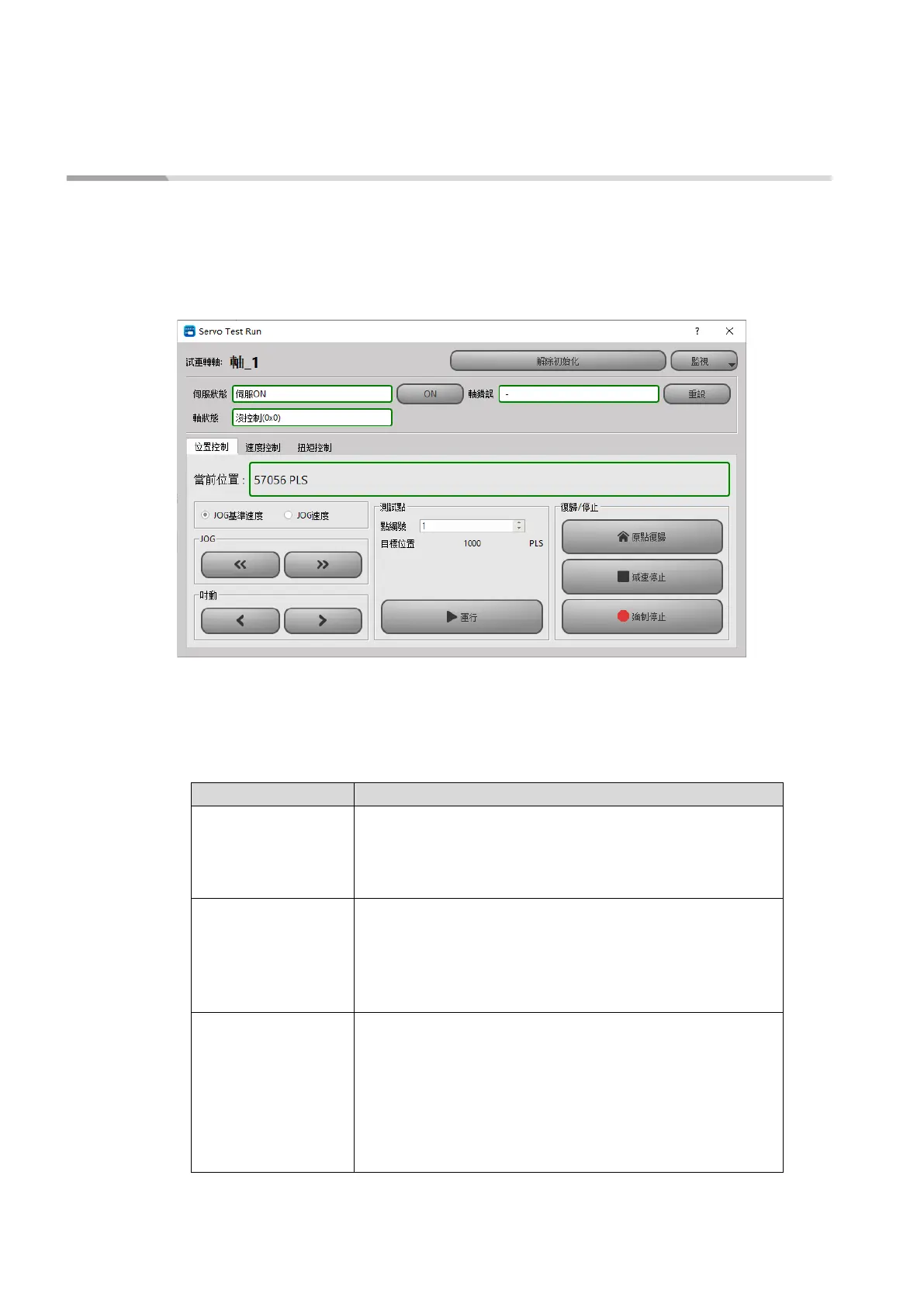
The screen of the position control for trial run is as shown in the figure below. The position control
provides a total of three control methods: “JOG”, “Test Point” and “HOME Return”, which
will be explained one by one below.
⚫ JOG Fintion Description
The control of the JOG mode is on the left side of the position control, and the user
can perform forward and backward tests by selecting different modes, and view it
from the current position.
After clicking, it will move at the JOG start speed set
by the motion axis until the user releases it, and the
servo operation will stop immediately.
(Same as JOG mode 0)
After clicking, it will move at the JOG start speed set
by the motion axis until the JOG distance set by the
motion axis is executed, and the servo operation will
be stopped immediately.
(Same as JOG mode 1)
After clicking, it will move forward from the JOG start
speed set by the motion axis, and accelerate to the
JOG speed set by the motion axis with the JOG
acceleration set by the motion axis, until the user
releases it, and decelerate to the JOG deceleration set
by the motion axis After the set JOG start speed, stop
the servo operation immediately.

 Loading...
Loading...