Chapter 6 Ladder Motion Commands
1-3
M-Series PLC Motion User Manual
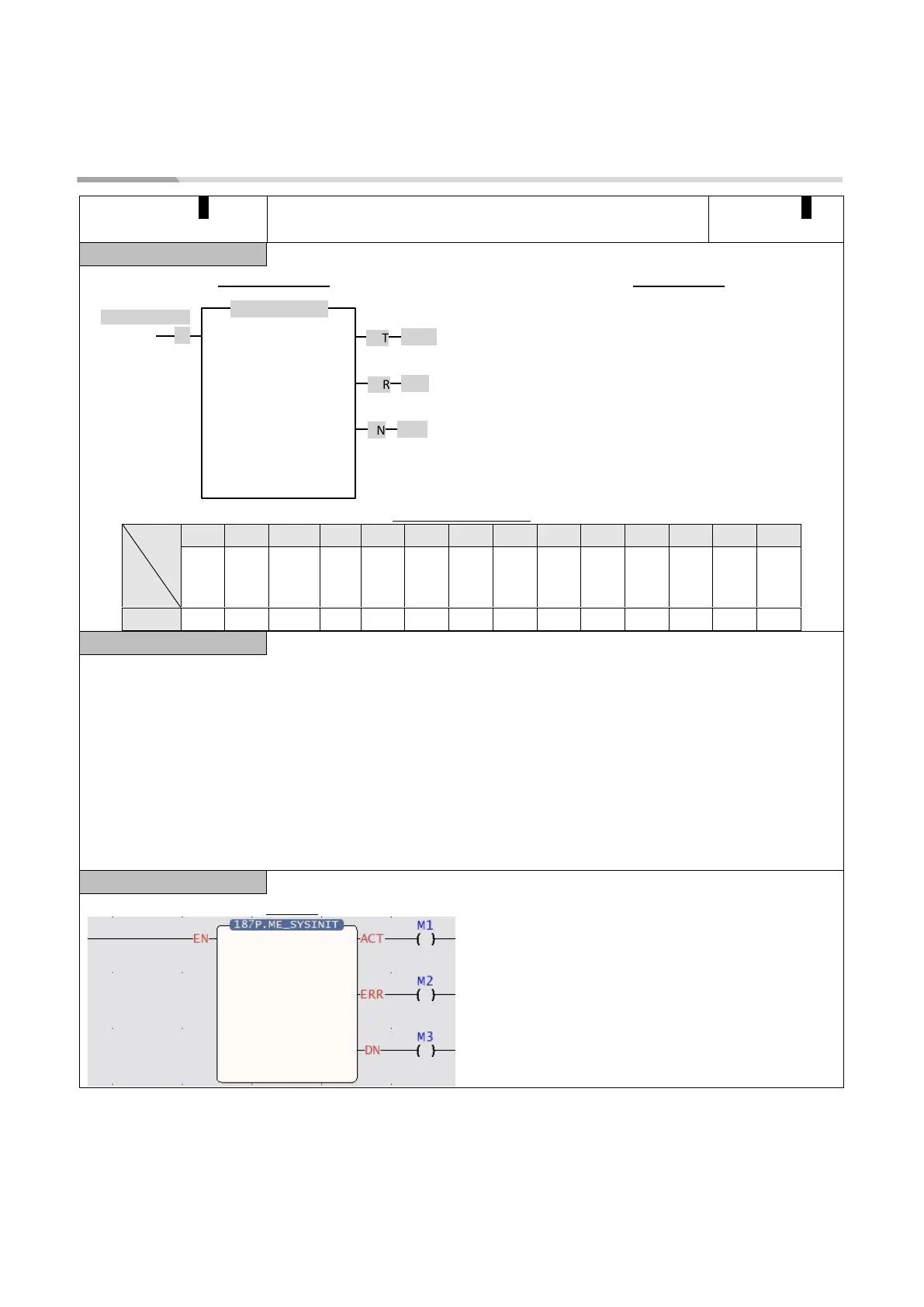
6-1 Fun187 System Initialization (ME_SYSINIT)
⚫ If you want to control the servo through EtherCAT communication, you must execute this
command before executing any motion control.
⚫ If you want to use Fun 235 to convert the physical axis to the virtual axis, it must be executed
before this command.
⚫ EN = 1: Motion Initialization is enabled (Trigger conditions support up and down differential
input)
⚫ ACT = 1: Motion Initialization is running
⚫ ERR – 1: Motion Initialization error
⚫ DN = 1: Motion Initialization is done

 Loading...
Loading...