ROBO I
NTERFACE
B
EDIENUNGSANLEITUNG
D
ROBO I
NTERFACE
B
EDIENUNGSANLEITUNG
D
6
7
Belegung der Tasten am IR-Handsender:
Die Motorausgänge M1–M3 des Interfaces lassen sich mit den entsprechenden Tasten des Senders ein-
und ausschalten. Für M1–M3 lässt sich auch die Geschwindigkeit des Motors zwischen schnell und langsam
um-schalten.
Der Motorausgang M4 wird über die beiden Tasten 1))) und 2))) aktiviert, mit denen normalerweise zwischen
Empfänger1 und Empfänger2 umgeschaltet wird. Die Geschwindigkeit von M4 lässt sich mit dem Handsender
nicht verändern.
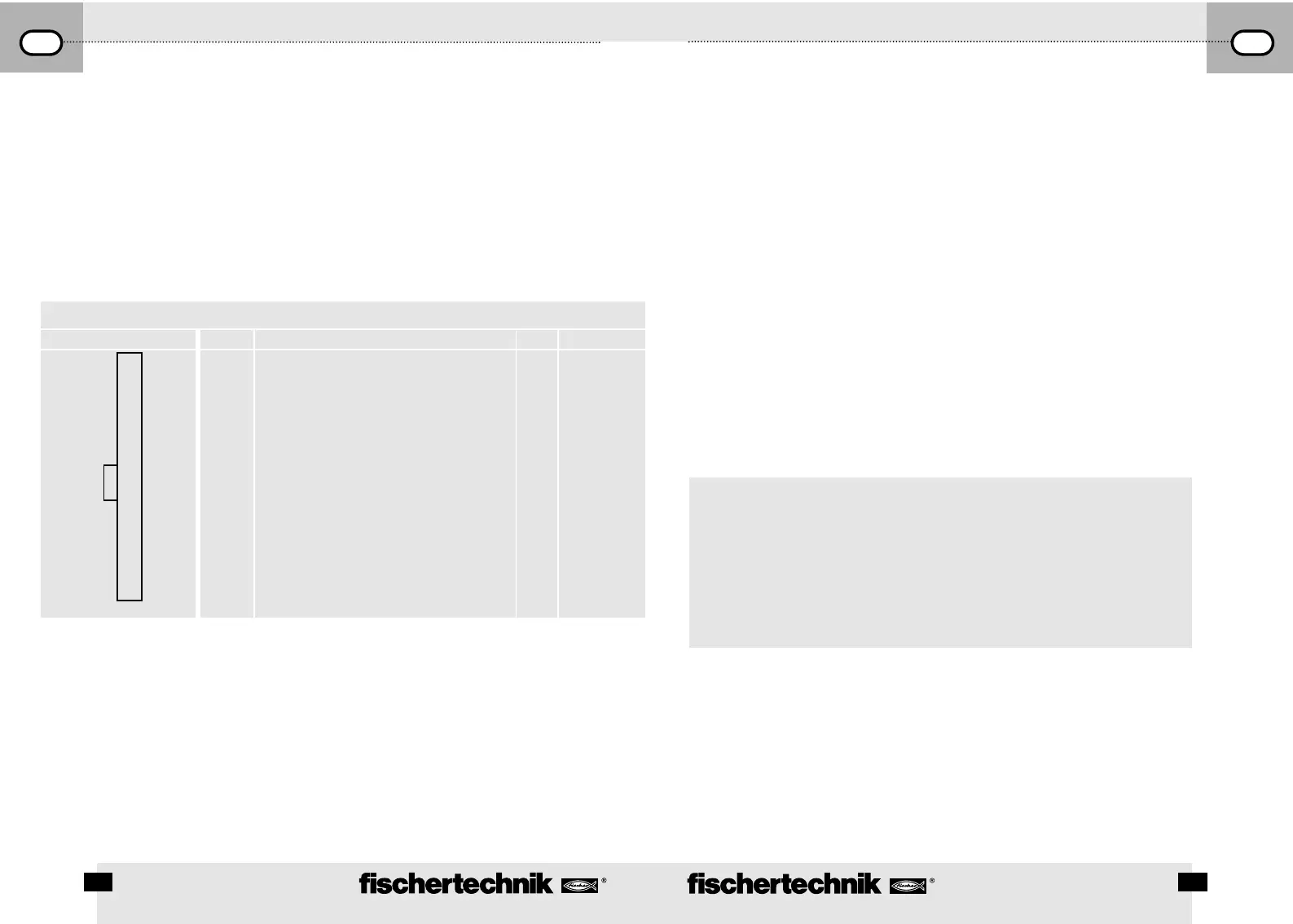
26-polige Stiftleiste (13)
Hier werden alle verfügbaren Ein- und Ausgänge noch einmal herausgeführt, damit man bei Bedarf ein Modell
über ein Flachbandkabel fest verkabeln und über einen einzigen 26-poligen Stecker mit dem Interface verbin-
den kann (Stecker und Flachbandkabel zusätzlich erforderlich).
Erweiterungsstecker für ROBO I/O-Extension (15)
Mit dem ROBO I/O-Extension (Art.-Nr. 93294, zusätzlich erforderlich), kann die Anzahl der Ein- und Ausgänge
erweitert werden. Es besitzt 4 weitere Motorausgänge mit Geschwindigkeitsregelung, 8 digitale Eingänge und
einen analogen Widerstandseingang für 0-5,5kΩ.
Erweiterungsstecker für ROBO RF Data Link (19)
Der ROBO RF Data Link ist eine optionale Funkschnittstelle für das ROBO Interface (Art.-Nr. 93295, zusätz-
lich erforderlich). Damit ist dann kein Verbindungskabel zwischen PC und Interface mehr erforderlich!
PC-seitig wird der RF Data Link an die USB-Schnittstelle angeschlossen. Frequenz: 2,4 GHz, Reichweite
ca. 10m.
1
3
5
7
9
11
13
15
17
19
21
23
25
2
4
6
8
10
12
14
16
18
20
22
24
26
Versorgungsspannung (9V) + für Tasterversorgung
Masseleitung für Analoganschlüsse/Distanzsensor/
schneller Zählereingang. Nicht als Gegenpol für
die Leistungsausgänge O1..O8 verwenden!
AX
AY
A1
A2
Distanzsensor D1
Distanzsensor D2
schneller Zählereingang
Masseleitung als Gegenpol für die Leistungs-
ausgänge O1..O8
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
I1
I2
I3
I4
I5
I6
I7
I8
O1
O2
O3
O4
O5
O6
O7
O8
1
2
3
4
5
6
7
8
9
10
Programmierung des Interfaces
n Die Standard-Programmiersoftware für das ROBO Interface ist die grafische Programmiersprache ROBO Pro.
Das Interface arbeitet in folgenden Betriebsarten:
Onlinemodus
Das Interface ist ständig mit dem PC verbunden (USB-/serielles Kabel oder RF Data Link). Das Programm läuft
auf dem PC, der Bildschirm dient als Bedienoberfläche.
„Intelligent-Interface Modus“
Durch Drücken des Tasters (5) für mindestens 3 Sekunden schaltet sich das Interface in den „Intelligent
Interface Modus“. Man erkennt diese Betriebsart an dem schnellen Blinken der seriellen Schnittstellen-LED (7).
In dieser Betriebsart ist nur die serielle Schnittstelle (mit den Parametern 9600,n,8,1) aktiv. Das ROBO Interface
verhält sich dabei wie ein Intelligent Interface (Art.-Nr. 30402). Damit kann es mit der Software LLWin 3.0 im
Online-Modus gesteuert werden. Der Download von LLWin Programmen ist nicht möglich! Durch kurzen
Tastendruck (5) gelangt man wieder zurück zur automatischen Schnittstellenauswahl des ROBO Interfaces.
Downloadmodus
In dieser Betriebsart wird ein Programm auf das Interface geladen und unabhängig vom PC abgearbeitet. Es
können 2 verschiedene Programme in den FLASH-Speicher geladen werden. Diese bleiben auch nach
Abschalten der Stromversorgung erhalten. Es besteht auch die Möglichkeit, ein Programm in den RAM-Speicher
zu laden. Dieses Programm wird gelöscht, sobald die Stromversorgung unterbrochen oder ein Programm
gestartet wird, das sich im FLASH-Speicher befindet.
Hinweis:
Das Speichern von Programmen in den RAM geht wesentlich schneller als das Speichern in den FLASH,
da der FLASH zuerst gelöscht werden muß, was einige Sekunden dauert. Im Teststadium kann
das Programm daher erst einmal in den RAM geladen werden. Idealerweise speichert man erst die
endgültige Version eines Programms im FLASH. Dies verlängert ferner die Lebensdauer des FLASH, die
auf ca. 100 000 Schreibzyklen „begrenzt“ ist.
Wie ein Programm in den jeweiligen Speicher des Interfaces geladen wird, ist in der Anleitung zur Software
ROBO Pro beschrieben.
Mit dem Taster (4) werden gespeicherte Programme ausgewählt, gestartet und gestoppt. Zur Programmaus-
wahl muß der Taster (4) dauerhaft betätigt werden. Falls in Prog1 ein Programm gespeichert wurde, leuchtet
nach ca. 1 Sekunde Tastendruck die LED „Prog1“ auf. Bleibt der Taster gedrückt, wird nach einer weiteren
Sekunde auf „Prog2“ umgeschaltet (falls dort ein Programm gespeichert ist). Nach einer weiteren Sekunde wäre
das Programm 3 (beide LED´s leuchten) im RAM ausgewählt (falls etwas gespeichert ist). Nach einer weiteren
Sekunde schalten sich beide LED´s aus. Es ist dann kein Programm ausgewählt.
Pinbelegung:
Steckerbelegung Pin Pinbelegung Pin Pinbelegung
 Loading...
Loading...

