Figure 4: Typical connection
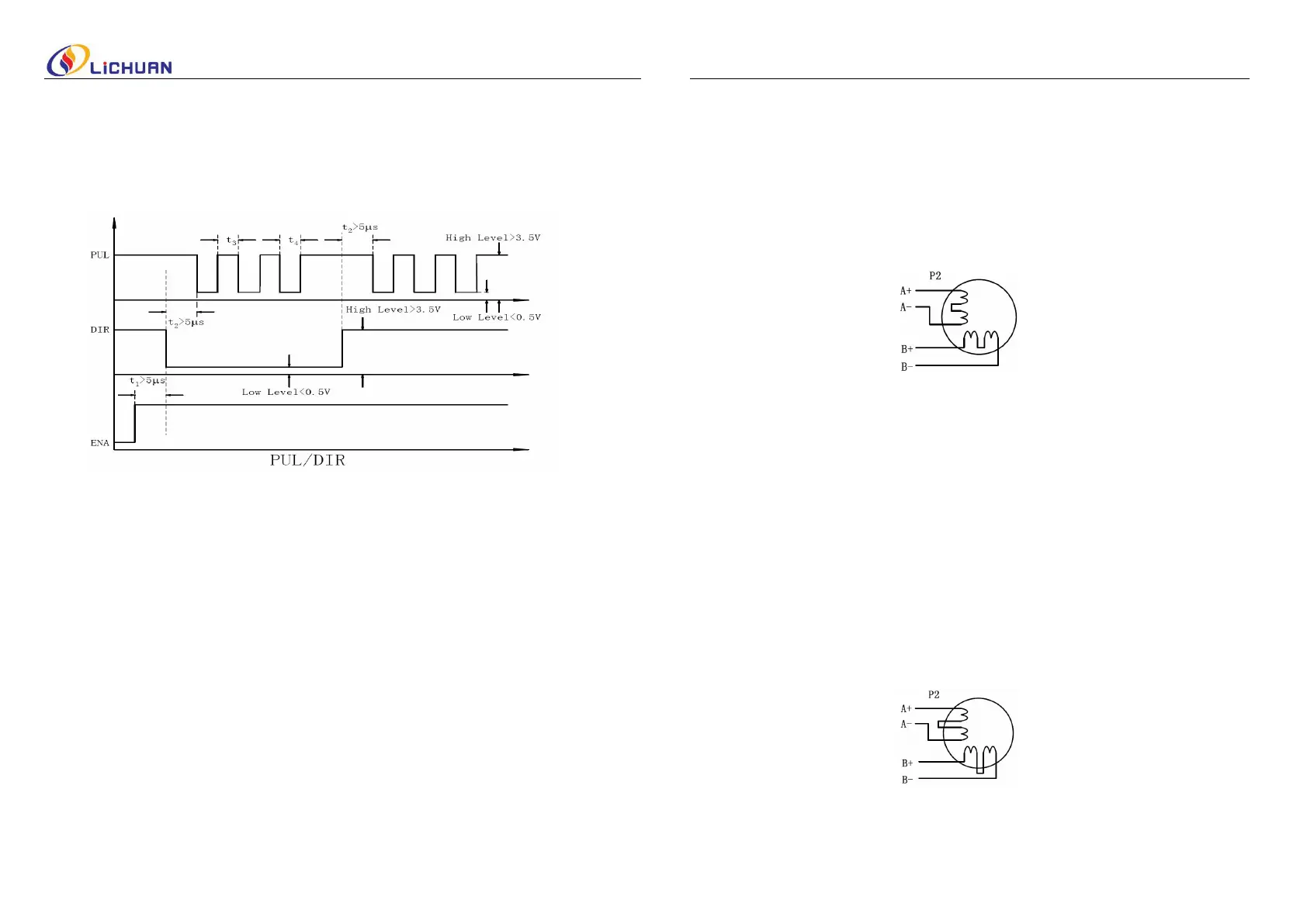
◆ Sequence Chart of Control Signals
In order to avoid some fault operations and deviations, PUL, DIR and ENA should abide
by some rules, shown as following diagram:
Figure 5: Sequence chart of control signals
Remark:
·
t1: ENA must be ahead of DIR by at least 5 ms. Usually, ENA+ and ENA- are NC (not
connected). See
“
Connector P1 Configurations
”
for more information.
· t2: DIR must be ahead of PUL effective edge by 5m s to ensure correct direction;
· t3: Pulse width not less than 1.5m s;
·
t4: Low level width not less than 1.5m s.
5. Connecting the Motor
The MC860H can drive any 2-pahse and 4-pahse hybrid stepping motors.
◆ Connections to 4-lead Motors
4 lead motors are the least flexible but easiest to wire. Speed and torque will depend on
winding inductance. In setting the driver output current, multiply the specified phase
current by 1.4 to determine the peak output current.
Figure 6: 4-lead Motor Connections
◆ Connections to 8-lead Motors
8 lead motors offer a high degree of flexibility to the system designer in that they may be
connected in series or parallel, thus satisfying a wide range of applications.
· Series Connections
A series motor configuration would typically be used in applications where a higher
torque at lower speeds is required. Because this configuration has the most inductance,
the performance will start to degrade at higher speeds. In series mode, the motors
should also be run at only 70% of their rated current to prevent over heating.
Figure 7: 8-lead motor series connections
 Loading...
Loading...