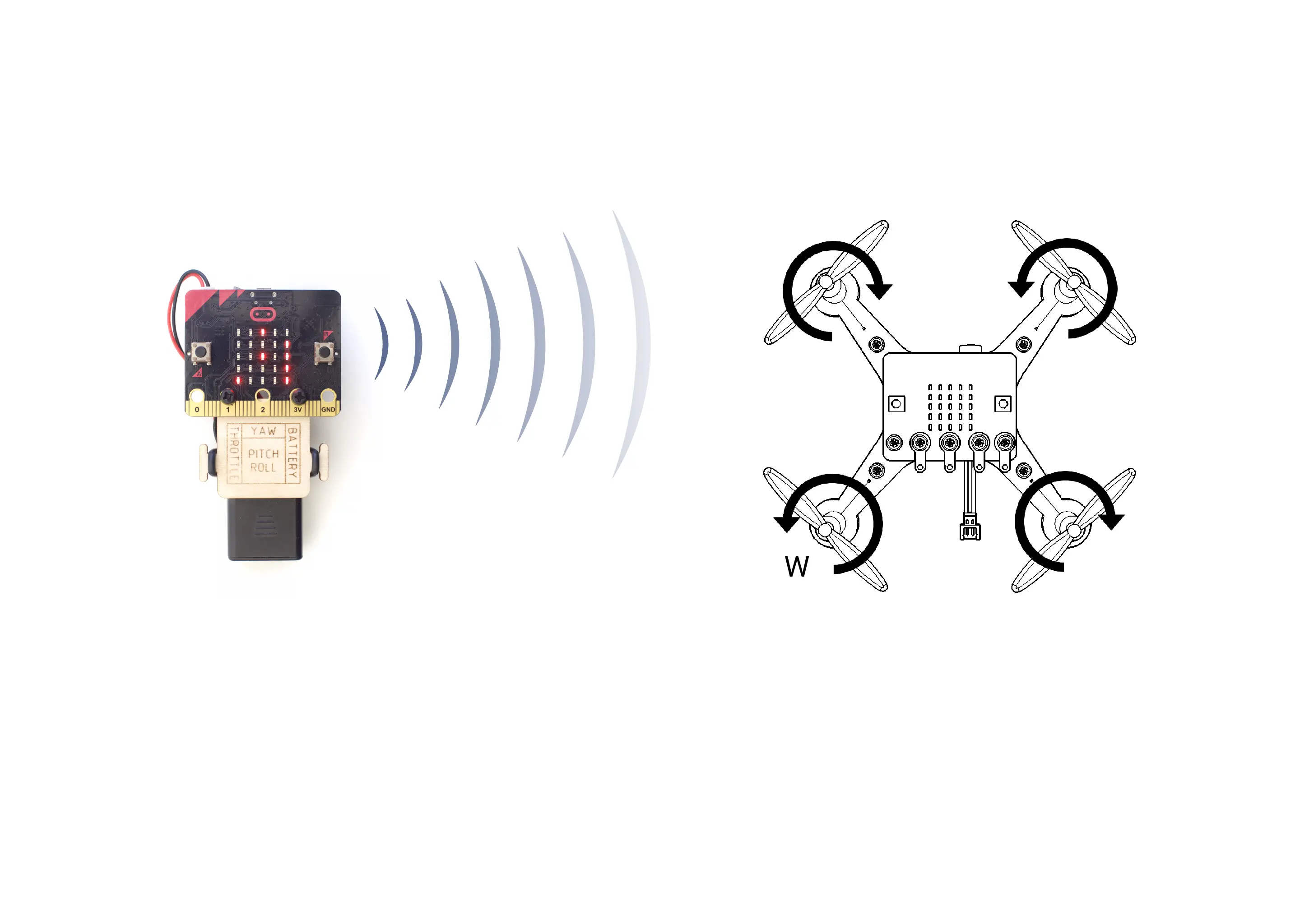
How the drone controls its path
• Two motors rotates with the clock (CW) and two rotates against the clock (CCW)
• The counter rotating setup prevents the drone from spinning around the yaw-axis.
• The drone ascends (Throttle) by making all the motors go equally faster
• The drone moves forwards (Pitch) by increasing power at the two back motors, while decreasing power to
the front motors. This tilts the drone forward.
• Sideways movement is done by speeding up two motors at one side (eg. left) then slowing down two
motors at the opposite side (eg. right)
• Drone can rotate around the Yaw-aksen by speeding up every other motor (eg. every CW motor) while
slowing down every CCW motor.
• The flight control board takes all the flight directions (PARTY) and mixes the info onto the four motors.
 Loading...
Loading...