92
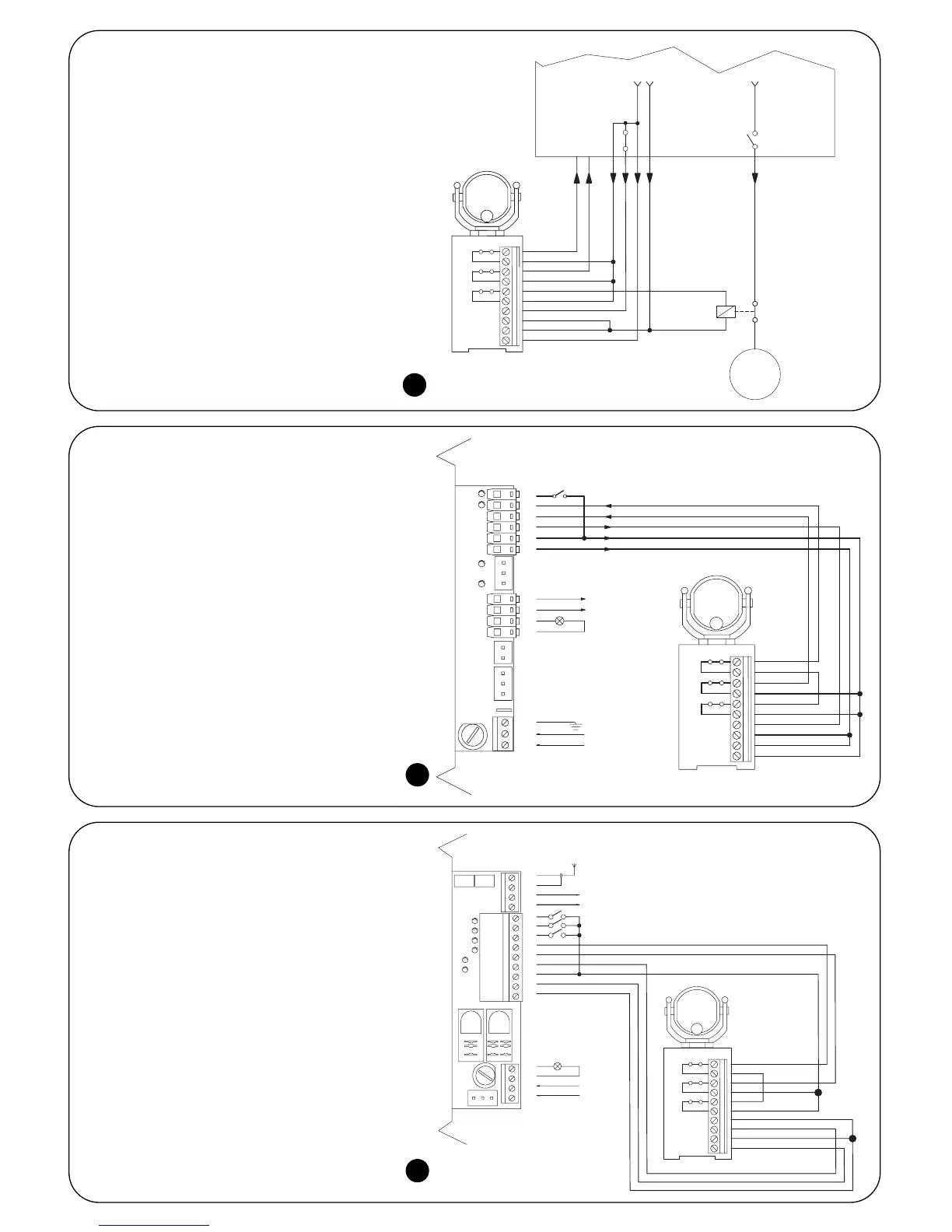
3.3.1) Voorbeeld van algemene aansluiting
Op afbeelding 18 zie u een voorbeeld van een alge-
mene aansluiting van FT210 op een besturingseen-
heid met ingangen FOTO; ALT en voorzien van uit-
gang voor Fototest. In deze configuratie dient u de
jumpers van de ontvanger RX als volgt in te stellen:
• JP1 ingeschakeld
• JP2
ingeschakeld, als activering van de ingang
ALT van de besturingseenheid onderbreking
en omkering van de beweging tot gevolg
heeft (in dit geval kan het op ALT1 op afbeel-
ding 18 aangesloten relais verwijderd worden
en moet het contact van ALT1 serieel op
FOTO worden geschakeld en op de ingang
FOTO van de besturingseenheid aangeslo-
ten, zoals u op afbeelding 19 en 20 ziet)
uitgeschakeld, als activering van de
ingang ALT van de besturingseenheid
alleen tot gevolg heeft dat de beweging
onderbroken wordt
3.3.2) Voorbeeld van aansluiting met bestu-
ringseenheid voorzien van “Fototest”
Op afbeelding 19 vindt u een voorbeeld van aanslui-
ting van FT210 op de besturingseenheid van de
reductiemotor ROBO model “RO300” met gebruik-
making van de functie Fototest. In deze configuratie
dient u de jumpers van de ontvanger RX als volgt in
te stellen:
• JP1 ingeschakeld
• JP2 ingeschakeld (besturingseenheid met
omkering van de beweging bij activering van
de ingang ALT)
3.3.3) Voorbeeld van aansluiting met bestu-
ringseenheid voorzien van uitgang SCA
Op afbeelding 20 vindt u een voorbeeld van aanslui-
ting van FT210 op de besturingseenheid van de
reductiemotor ROBO model RO1000 waarbij
gebruik gemaakt wordt van de uitgang SCA.
In deze configuratie dient u de jumpers van de ont-
vanger RX als volgt in te stellen:
• JP1 uitgeschakeld
• JP2 iingeschakeld (besturingseenheid met
omkering van de beweging bij activering van
de ingang ALT)