Building instructions
OnStep Controller
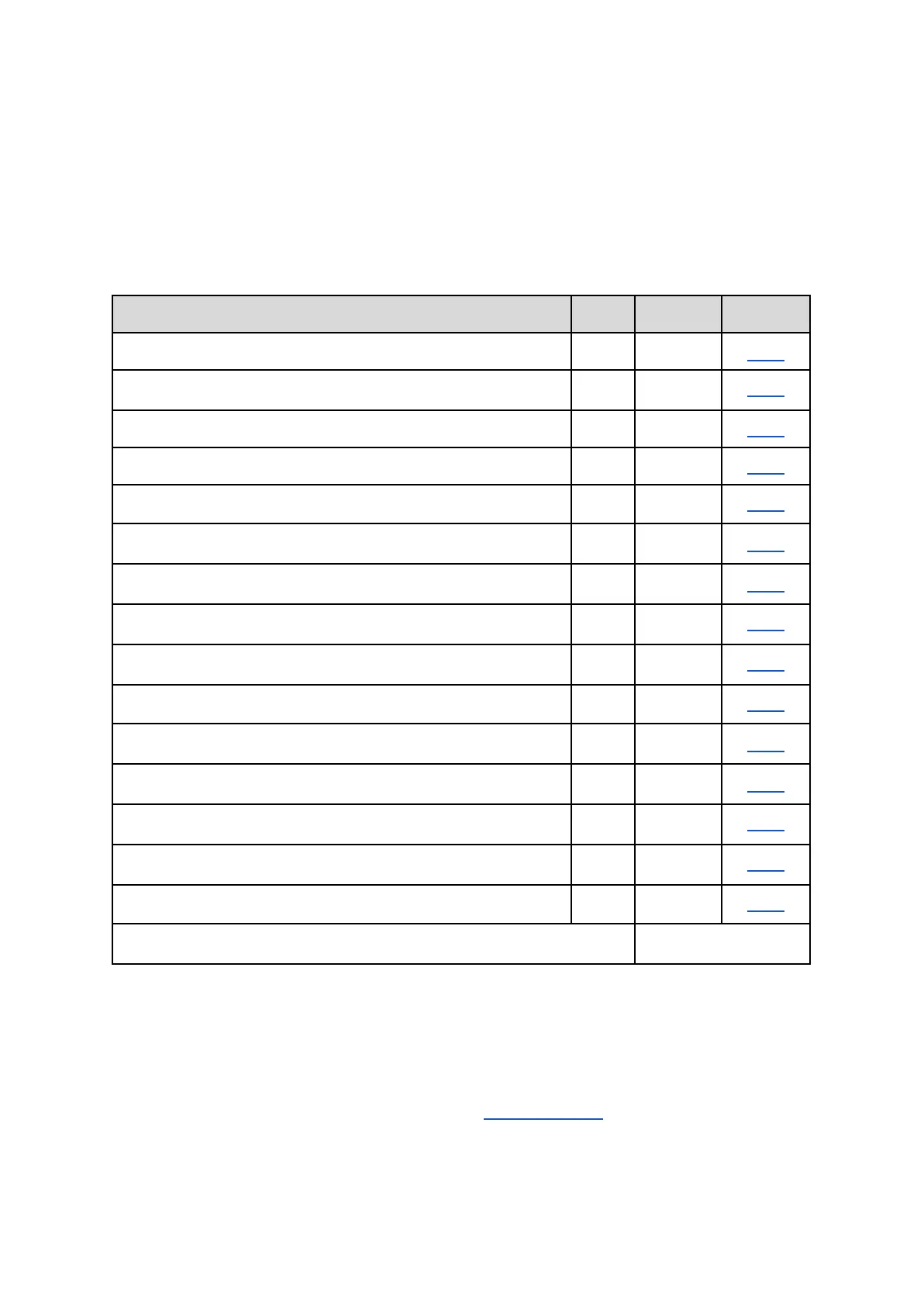
Bill of materials
WEMOS D1 R32 ESP32 WiFi BT Development Board
NEMA17 Stepper Motor 0.9deg 1.68A 40mm*
GT2 12t 6.35mm bore 6mm belt pulley (DEC shaft)
GT2 16t 6.35mm bore 6mm belt pulley (RA shaft)
GT2 48t 5mm bore 6mm belt pulley (Stepper shafts)
GT2 6mm 150 Closed Loop Timing Belt (RA Axis)
GT2 6mm 140 Closed Loop Timing Belt (DEC Axis)
RJ45 breakout boards (Pack of 6pcs, but only 5 needed)
RJ11 / RJ12 / 6P6C Breakout Board
DS3231 Real Time Clock***
Set of Dupont 20cm Jumper Wire (FF/MM/FM)
Set of 5.5x2.1mm DC Power Plugs (F/M)
* Cheap stepper motor, but not the most efficient one. Based on some forum posts there
seems to be versions of this motor rated for 0.9A only with similar performance. This should
probably be considered if you’re aiming for maximum energy efficiency (ie. maximum battery
life etc.)
** I used a NodeMCU ESP8266 DevBoard I already had from an earlier project (and it’s
been dead stable), but the Wiki recommends the Wemos D1 Mini version.
*** I’m not really sure if this RTC is adding any real benefit or improvements to this system,
but since these cost next to nothing I figured it was best to include it just to be on the safe
side.