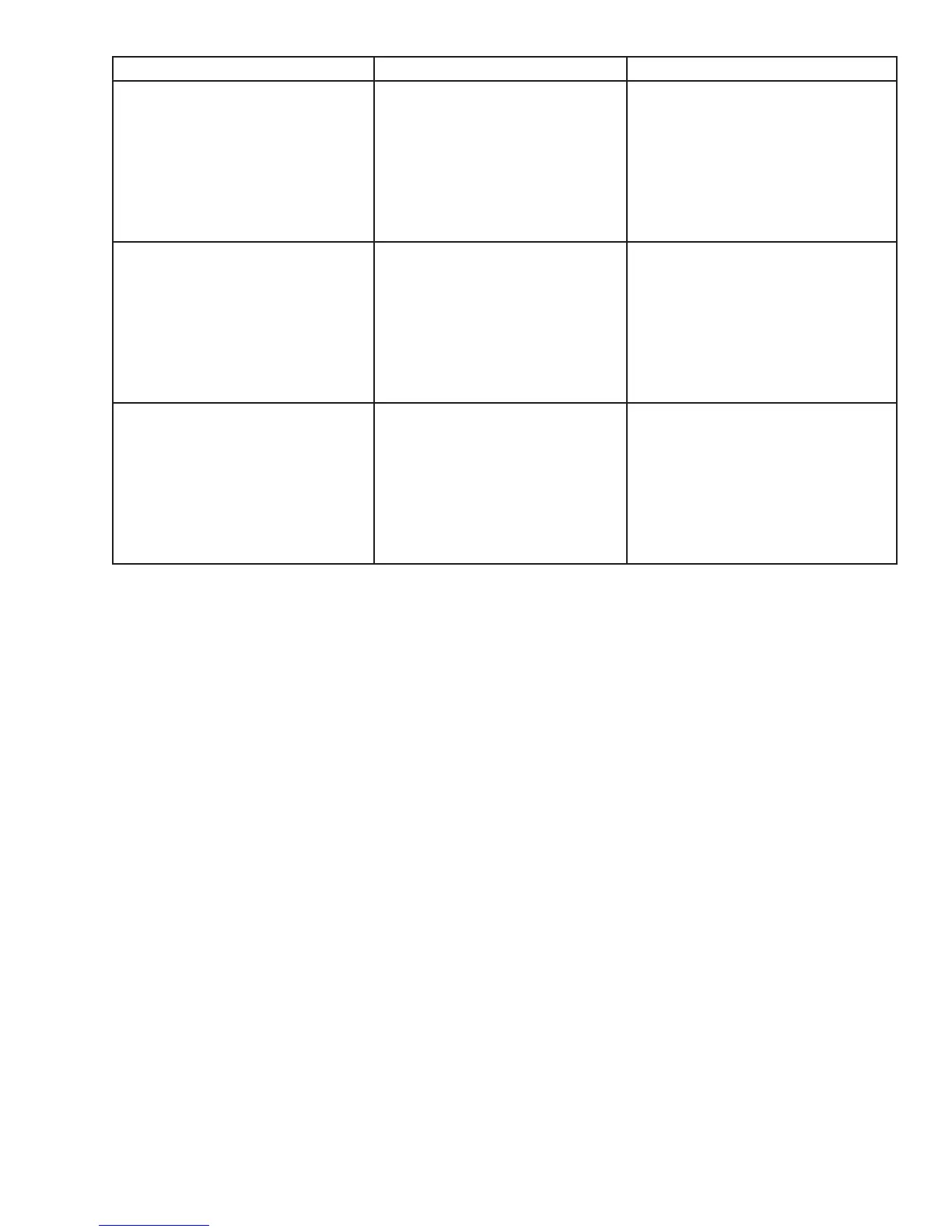
Description Function Coding Example (for controller ID = 1)
Read Battery Pack Voltage
Reads the voltage of the TETRIX
battery pack powering the controller.
The value read is an integer.
readBatteryVoltage(ID#);
Data Type:
ID# = integer
Data Type Returned:
value = integer
readBatteryVoltage(1);
Read the voltage of the TETRIX battery
pack powering the controller.
Example: A value of 918 equals 9.18 volts.
Set Speed PID Algorithm
Coefficients
Sets the P, I, and D coefficients for
constant speed control.
setMotorSpeedPID(ID#, P, I, D);
Data Type:
ID#, P, I, D = integer
setMotorSpeedPID(1, 1500, 2500, 8);
Set the PID coefficients of the constant
speed algorithm.
P = 1.5, I = 2.5, D = .008
Note: Controller firmware divides each
coefficient by 1,000.
Set Target Position PID Algorithm
Coefficients
Sets the P, I, and D coefficients for
target hold position control.
setMotorTargetPID(ID#, P, I, D);
Data Type:
ID#, P, I, D = integer
setMotorTargetPID(1, 1500, 0, 5);
Set the PID coefficients of the constant
speed algorithm.
P = 1.5, I = 0, D = .005
Note: Controller firmware divides each
coefficient by 1,000.