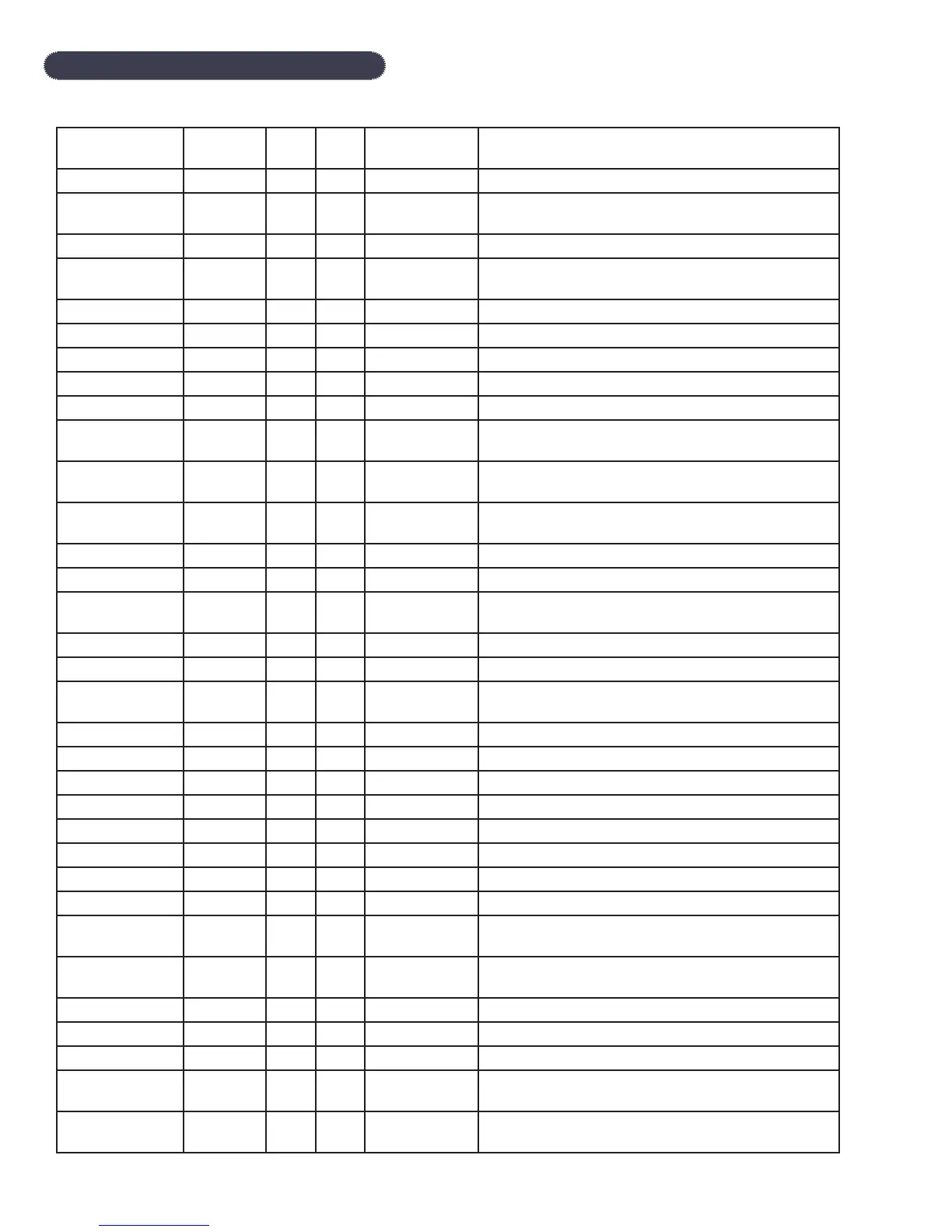
Register Name HEX Byte
Command
Write
Bytes
Read
Bytes
R/W Assembled
Data Type
Description
DC_Firmware 0x26 0 1 unsigned Returns the firmware version.
Set_EXP_ID 0x24 1 0 unsigned Sets/changes the i2C address/ID of the motor
controller.
Battery_Voltage 0x53 0 2 unsigned Returns the battery voltage.
WDT_STOP 0x23 0 0 none Forces a watchdog timer reset/restart of the motor
controller processor.
Controller_Enable 0x25 0 0 none Enables the motor controller.
Controller_Reset 0x27 0 0 none Signals an internal firmware reset.
Motor1_Power 0x40 1 0 signed Sets the power level for Motor 1.
Motor2_Power 0x41 1 0 signed Sets the power level for Motor 2.
Motor_Powers 0x42 2 0 signed Sets the power levels for Motor 1 and Motor 2.
Motor1_Speed 0x43 2 0 signed Sets the speed parameter for Motor 1 in degrees per
second.
Motor2_Speed 0x44 2 0 signed Sets the speed parameter for Motor 2 in degrees per
second.
Motor_Speeds 0x45 4 0 signed Sets the speed parameters for Motor 1 and Motor 2 in
degrees per second.
Motor1_Target 0x46 6 0 signed Sets the encoder count target parameter for Motor 1.
Motor2_Target 0x47 6 0 signed Sets the encoder count target parameter for Motor 2.
Motor_Targets 0x48 12 0 signed Sets the encoder count target parameters for Motor 1
and Motor 2.
Motor1_Degree 0x58 6 0 signed Sets the encoder degree target parameter for Motor 1.
Motor2_Degree 0x59 6 0 signed Sets the encoder degree target parameter for Motor 2.
Motor_Degrees 0x5A 12 0 signed Sets the encoder degree target parameters for Motor 1
and Motor 2.
Motor1_Invert 0x51 1 0 unsigned Sets the invert direction condition for Motor 1.
Motor2_Invert 0x52 1 0 unsigned Sets the invert direction condition for Motor 2.
Motor1_Busy 0x4F 0 1 unsigned Returns the busy status of Motor 1.
Motor2_Busy 0x50 0 1 unsigned Returns the busy status of Motor 2.
Motor1_Current 0x54 0 2 unsigned Returns the Motor 1 load current in milliamps.
Motor2_Current 0x55 0 2 unsigned Returns the Motor 2 load current in milliamps.
Encoder1_Count 0x49 0 4 signed Returns the Motor 1 encoder count.
Encoder2_Count 0x4A 0 4 signed Returns the Motor 2 encoder count.
Encoder1_
Degrees
0x5B 0 4 signed Returns the Motor 1 encoder position in degrees.
Encoder2_
Degrees
0x5C 0 4 signed Returns the Motor 2 encoder position in degrees.
Reset_Encoder1 0x4C 0 0 none Resets encoder 1 count to 0.
Reset_Encoder2 0x4D 0 0 none Resets encoder 2 count to 0.
Reset_Encoders 0x4E 0 0 none Resets encoder 1 and encoder 2 to 0.
Speed_PID 0x56 6 0 unsigned Sets the P, I, and D coefficients of the constant speed
algorithm.
Target_PID 0x57 6 0 unsigned Sets the P, I, and D coefficients of the target hold
position algorithm.
In-Depth Technical Specifications
TETRIX MAX DC Motor Expansion Controller Command Register Map
 Loading...
Loading...