Do you have a question about the QYSEA FIFISHV-EVO and is the answer not in the manual?
Important safety warnings and guidelines for operating the ROV.
Guidance on protecting marine life and coral reefs during operation.
Overview of the FIFISH V-EVO underwater drone and its capabilities.
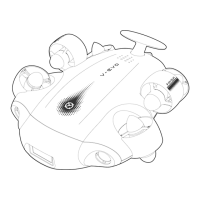
Identification and description of key ROV parts and their functions.
Identification of all buttons, sticks, and parts of the remote controller.
Identification of the spool and tether parts.
Instructions for charging the ROV and remote controller before use.
Steps to download and install the FIFISH mobile application.
Overview of connecting the ROV, controller, and spool.
Steps to connect the remote controller to the Wi-Fi network.
Activating live streaming and understanding the main control interface.
Steps for deploying the ROV into the water and starting a dive.
Steps for safely retrieving the ROV from the water.
Explanation of the ROV's 6 degrees of freedom and movement capabilities.
Description of Attitude, Sport, and Combination control modes.
Step-by-step guide for installing the optional robotic arm.
Procedures for cleaning and maintaining ROV motors after use.
Guidelines for long-term battery storage and care.
Detailed technical specifications for the FIFISH V-EVO ROV.
Detailed technical specifications for the ROV's camera system.
Specifications for LED beams, remote controller, and chargers.
Specifications for spool, tether, and optional robotic arm.
Conditions under which after-sale services do not apply.
How to contact QYSEA for help and support.
The FIFISH V-EVO is a compact, omni-directional Remotely Operated Underwater Vehicle (ROV) designed for underwater exploration and cinematic filmmaking. It integrates advanced drone robotics and AI technology to provide an immersive underwater experience, breaking the limits of traditional dive photography.
The FIFISH V-EVO is an underwater drone equipped with a 4K 60FPS high frame-rate camera and capable of 360-degree autonomous movements. It allows users to capture unique and cinematic underwater films and conduct explorations. The ROV features six thrusters (four vector and two horizontal) that enable six degrees of freedom (6 DOF) movement, including moving left and right, up and down, forward and backward, and 360-degree rotation in yaw, pitch, and roll. This omni-directional capability allows for precise control and maneuverability in various underwater environments.
The ROV is controlled via a remote controller (RC) and a dedicated FIFISH APP, which can be installed on a smart device. The RC features dual control sticks for movement, buttons for thruster lock/unlock, depth holding, taking pictures, and video recording/stopping. It also includes wheels for LED brightness control and, optionally, for operating a robotic arm. The RC connects to the ROV via a tether, which also serves as a communication link.
The FIFISH V-EVO supports three control modes: Attitude Auto mode (A), Sport mode (S), and Combination mode (C).
The ROV is equipped with two 2,500 lumens LEDs for illumination, a mounting port for accessories, vent holes, a Q-interface, and a tether port. An optional robotic arm can be installed, which is activated only in Attitude mode (Mode A) and controlled using the right wheel on the RC to open and close its claws.
| Camera Resolution | 12MP |
|---|---|
| Depth Rating | 100 m |
| Battery Life | 4 hours |
| Max Speed | 3 Knots |
| FOV | 166° |
| Photo Resolution | 12 MP |
| Connectivity | Wi-Fi, Bluetooth |
| Video Resolution | 3840 x 2160 |
| ISO Range | 100-6400 |
| Operating Temperature | 0 to 40 °C |
| Control | Remote Controller |
| Battery | Lithium-ion 98Wh |
| Thrusters | 6 thrusters |