Injection Molding Machine Appendix C
C-1 V3.0
Appendix C: Robot Connection
The connections described herein is for TMC’s standard robot interface,
if machine is equipped with Euromap or SPI robot interface, refer to related
circuit diagram for wirings.
1 Signal definitions
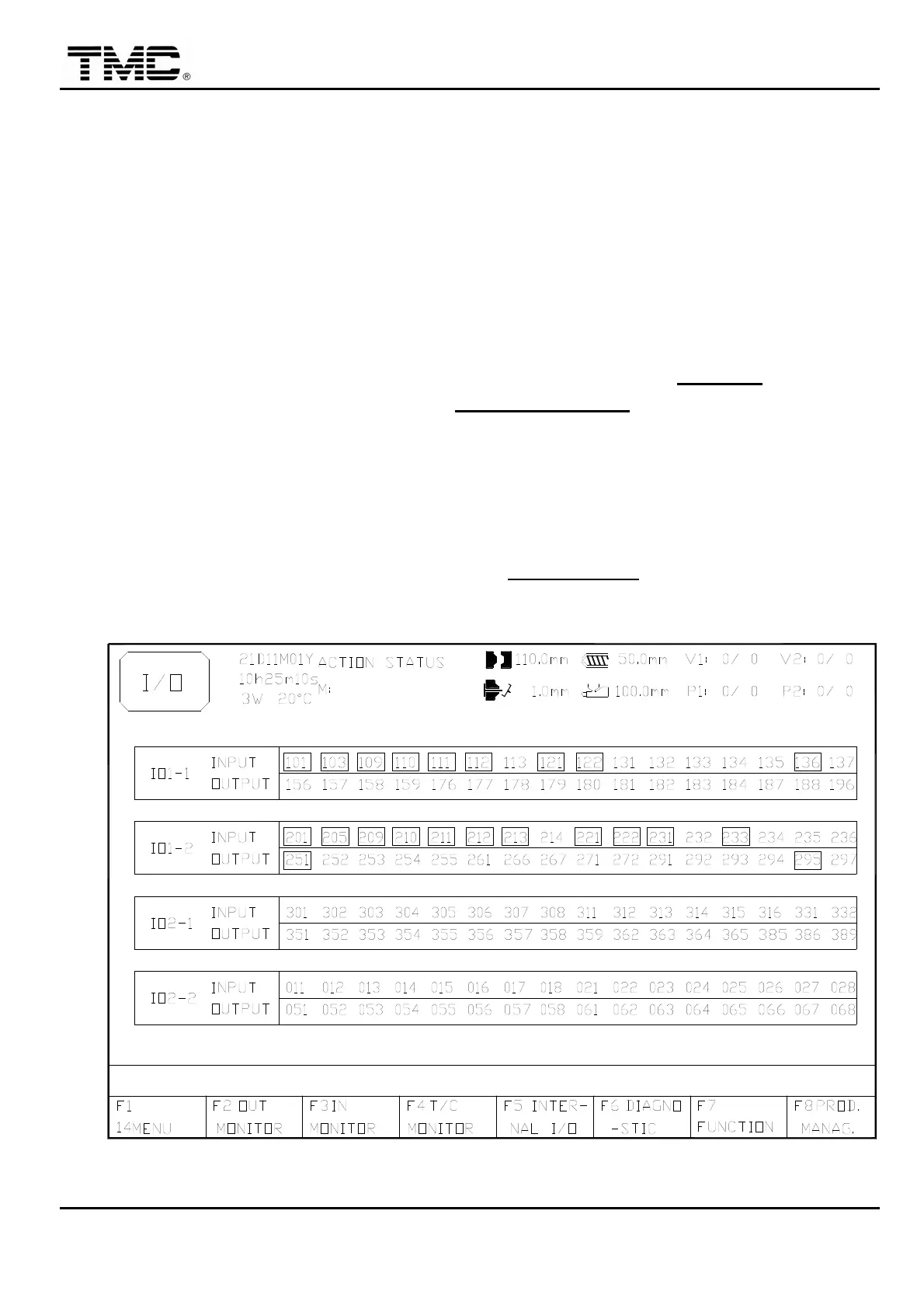
IO222:Robot enables clamp close,when IO222 is ON, clamp close is allowed.
IO196:Signal for robot to come in, when clamp opened to OPEN END position
or clamp position is greater than ROBOT SIGNAL PT. setting value, IO196
is ON.
IO136:Robot enables core movement, core movement is enabled only when
IO136 is ON.
IO101:It is ON when operator gate is closed, is OFF when gate is opened.
IO1020:Internal IO, set on when machine has euromap or spi robot interface.
Remarks: IO status can be monitored on EXTERNAL I/O screen, highlighted
represents ON status.
 Loading...
Loading...