37
CAN (Controller Area Networking)
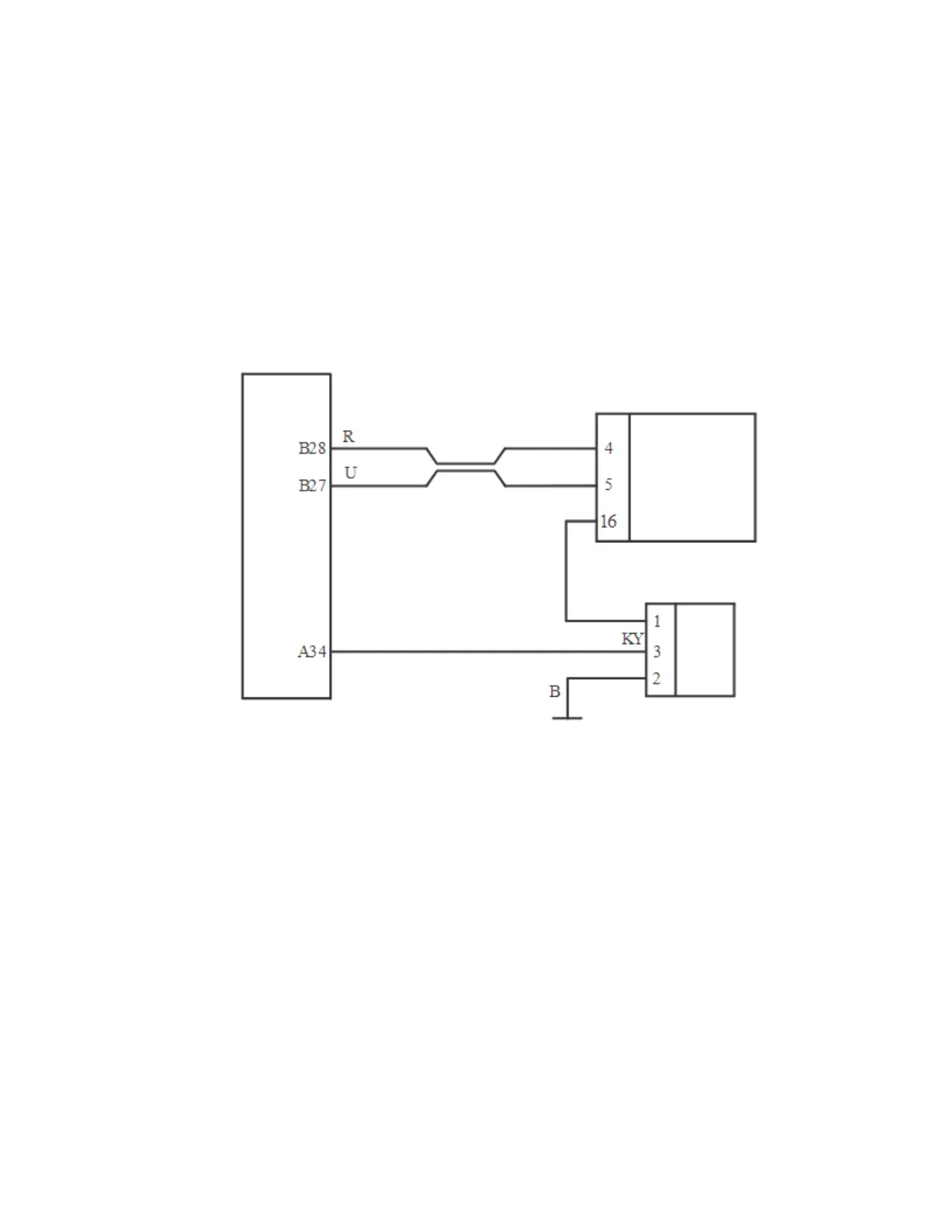
CAN (sometimes called CANbus) is a protocol for data communication between
Electronic Control Modules (ECMs). Each ECM on the network is connected by a single
pair of twisted wires (or bus) which are used for the transmission of vehicle sensor data.
By using CAN, the overall number of system sensors, and the amount of cabling required
to allow ECMs to communicate with each other is greatly reduced.
This saves cost, weight and space, and makes the system more reliable, as the physical
number of wires and connections is reduced.
CAN works by each ECM sending out 'packets' of information (such as engine speed or
fuel consumption information) on to the network bus (note that the network must be
free of data before any ECM is allowed to transmit). This data is given a priority
according to its importance (for example 'engine speed' may have a higher priority than
'low fuel level'), so that even if two ECMs send data at the same time, high priority
information is always sent first. Lower priority data is then resent after the high priority
data has been received by all ECMs on the network.
The receiving ECM confirms the data has been received correctly and that the data is
valid, and this information is then used by the ECM as necessary. Specific data not
required by an ECM will still be received and acknowledged as correct but then
disregarded (for example if an ECM does not require 'clutch switch position' information,
this data packet would be ignored).