08. Use of Mobile APP
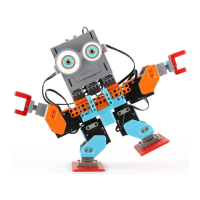
Fall-over Management
Select the disassembly tutorial to learn about how to
disassemble the robot.
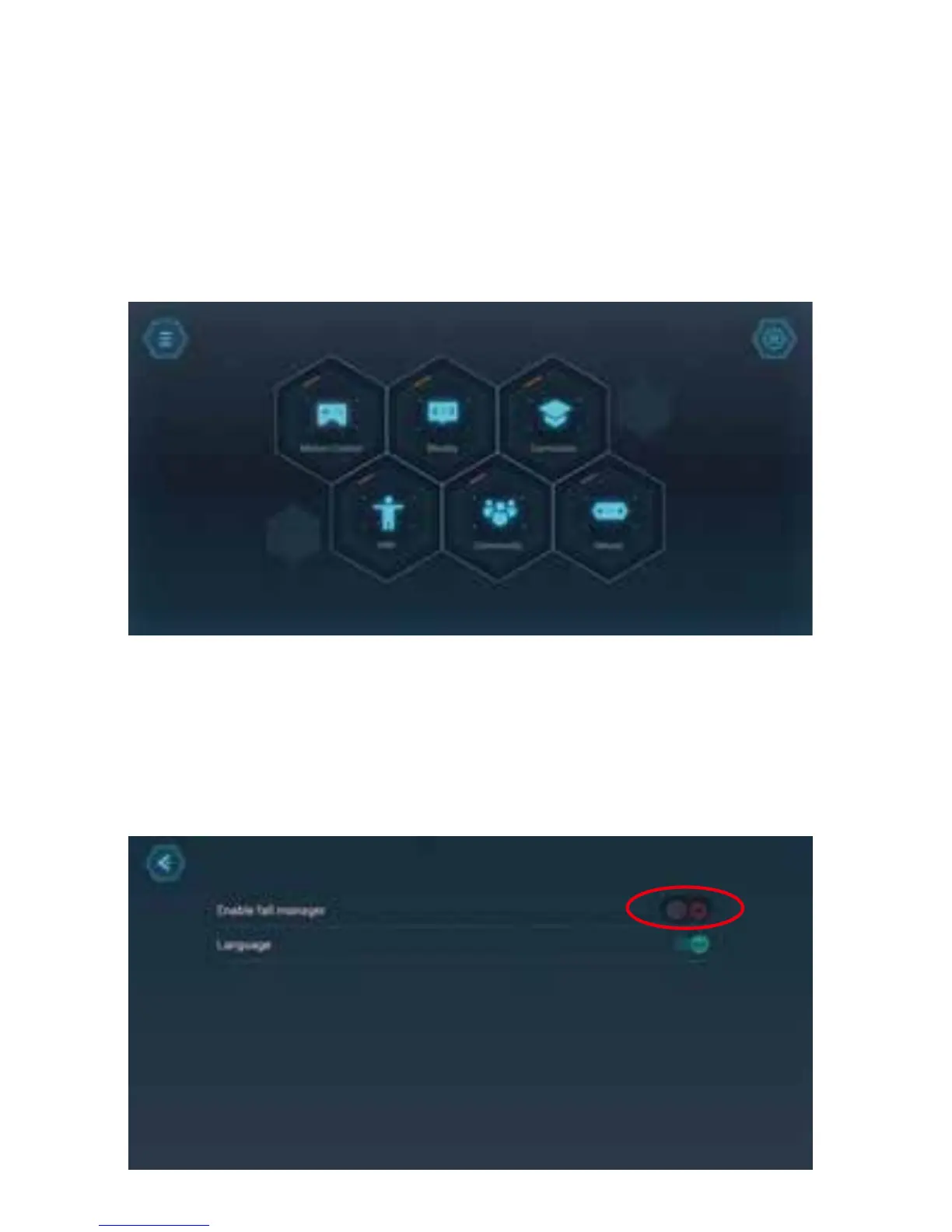
The mobile APP has a built-in graphic user interface and
integrates features including motion tracking, FPV, Blockly
visual programming, action readback programming,
curriculums, BBS and real-time sensor data view.
This feature is off by default. You can enable the feature via
the APP. The robot can pick itself up if it falls over when
enabled.