28
6. botão StandBy
Após dois minutos de inavidade, o robô entra no modo “standby”,
fechando funcionar o comando.
Antes de entrar em modo StandBy, o robô diz-lhe repedamente.
Ao pressionar o botão “standby”, o robô será reavada e fez a
introdução novamente.
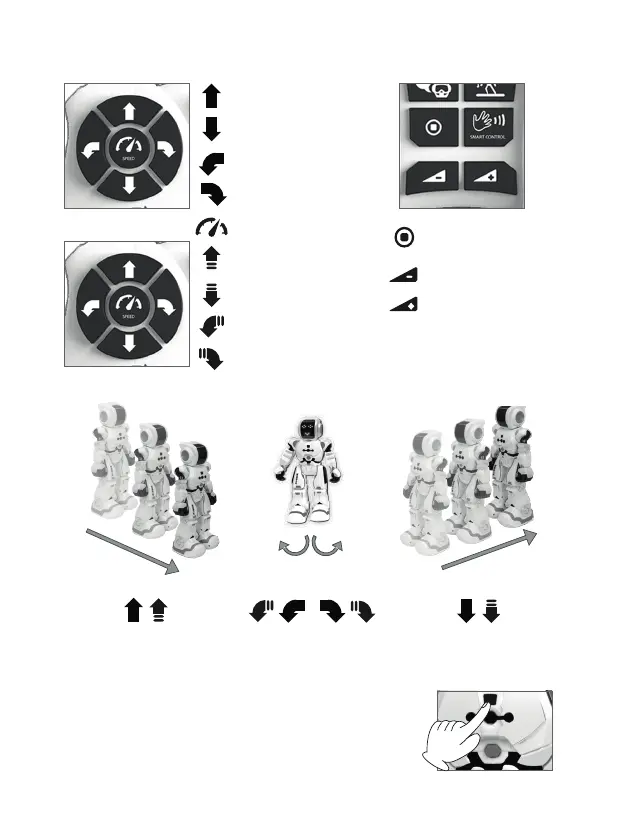
5. funções básicas
Andar o deslizar para a frente Girar a dereita o a esquerda Andar o deslizar para trás
Deslizar para a frente
Deslizar para trás
Deslizar para a direita
Deslizar para a esquerda
Velocidade (Rápido / Lento)
Andar a frente
Andar para trás
Andar para a direita
Andar para a esquerda
Parar de qualquer função
que está executando
Baixar volume
Subir volume