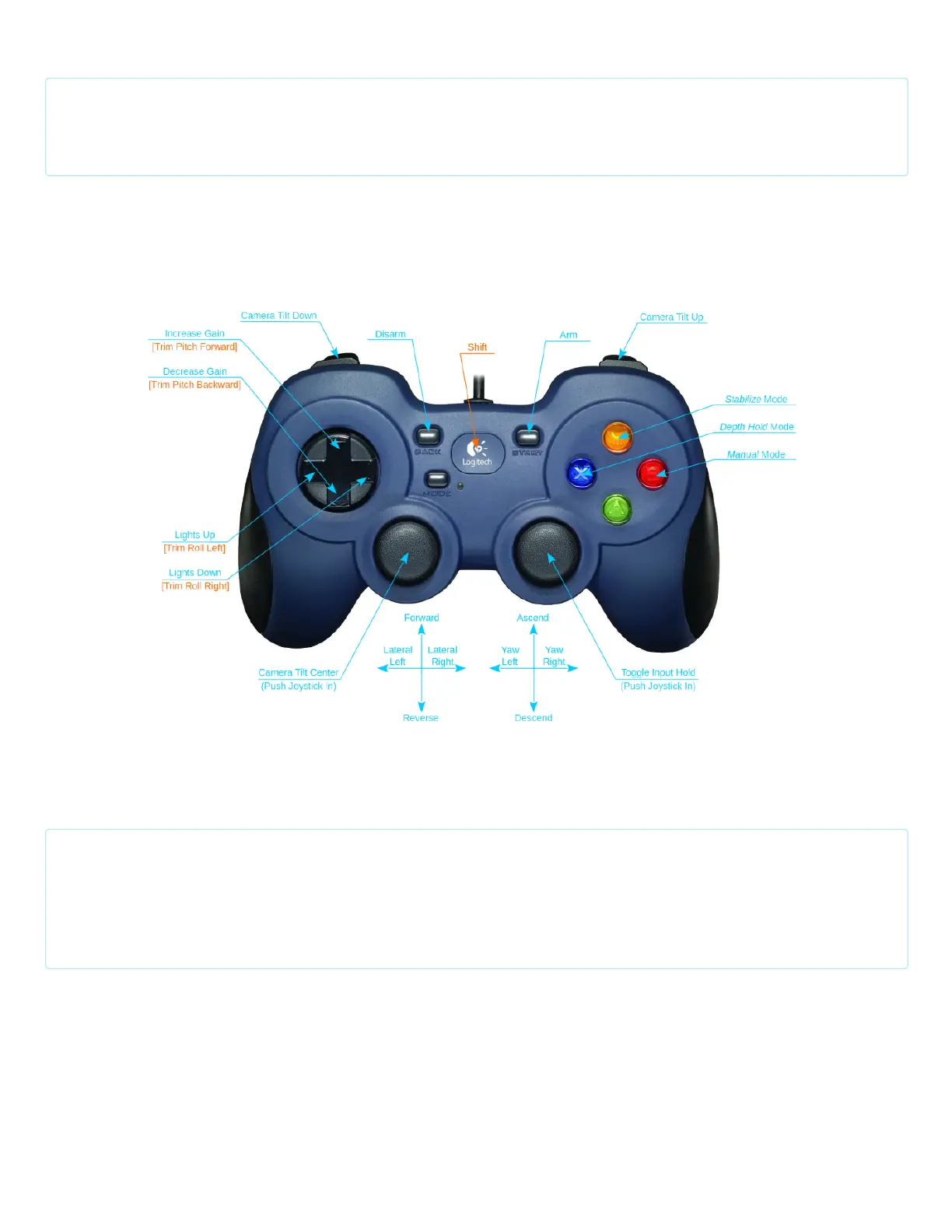
1. Using the joystick button functions for
trim_roll
and
trim_pitch
.
Push the buttons once, or hold them down to adjust the roll and pitch angle of the vehicle.
(https://www.bluerobotics.com/wp-content/uploads/2019/03/joystick-defaults.png?x62571)
2. Using the joystick button function
roll_pitch_toggle
.
Push the button to toggle the function of one joystick between controlling forward/lateral input and controlling
roll/pitch input.
This function is standard with the BlueROV2 setup.
This is an advanced function. To setup this function, please reference the ArduSub Button Setup page
(https://www.ardusub.com/getting-started/initial-setup.html#button-setup) (This function is very developmental, use with
caution)
 Loading...
Loading...