Training Center of After-Sales Department Chery International
12. Instrument cluster
178
2. Function description
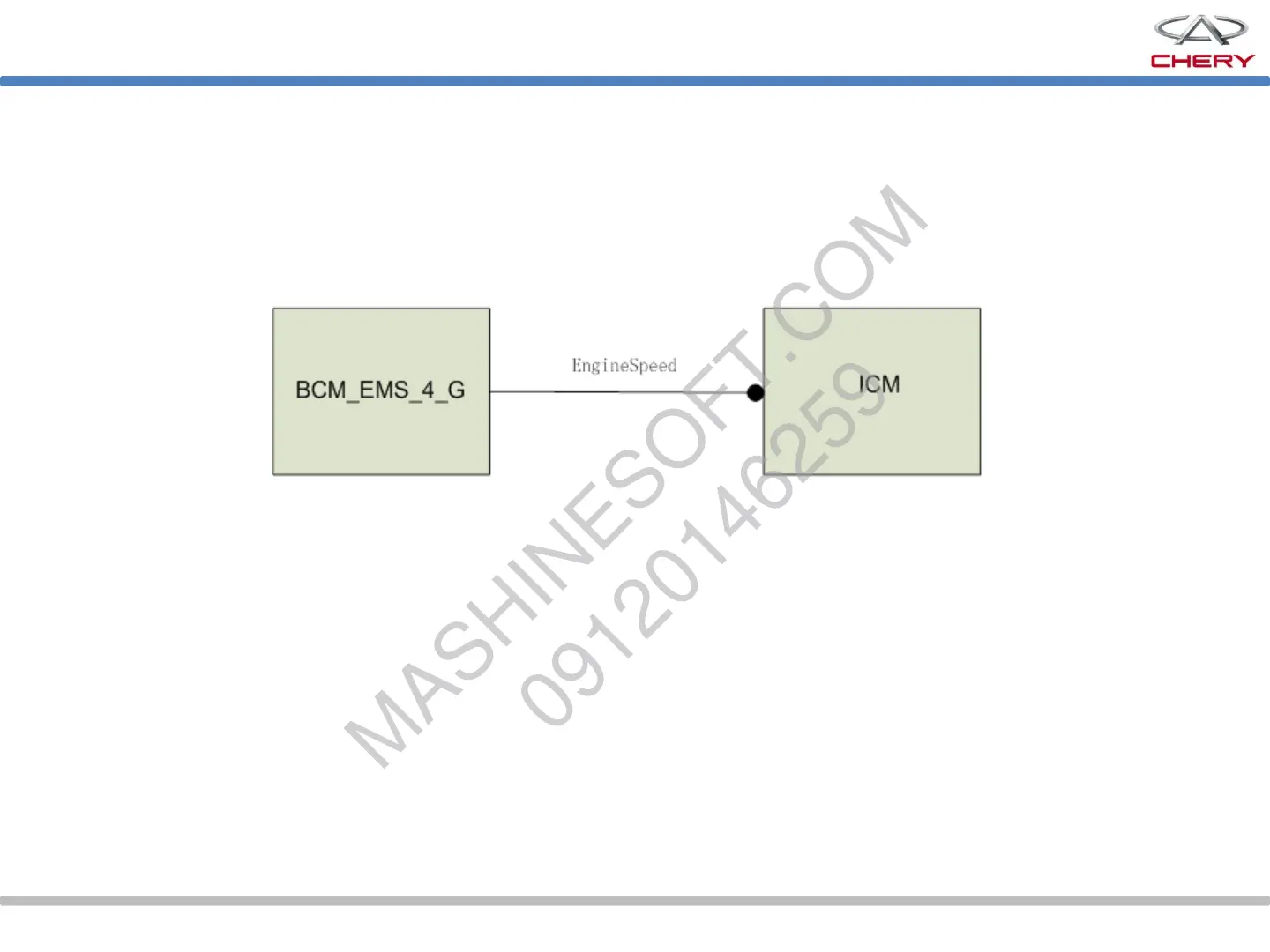
Tachometer
– The tachometer is driven by the stepping motor, and the signal is transferred by CAN,
with the signal source as follows:
– Handling of revolution error
If the instrument fails to receive ECM CAN node revolution within 2.5s, the
revolution pointer of the instrument cluster will stay at the current position;
2.5s later, the revolution pointer will be zeroed.
 Loading...
Loading...





