Examples
Launching Nav2 with synchronous SLAM:
ros2 launch turtlebot4_navigation nav_bringup.launch.py slam:=sync
The map and costmaps can be viewed in Rviz2:
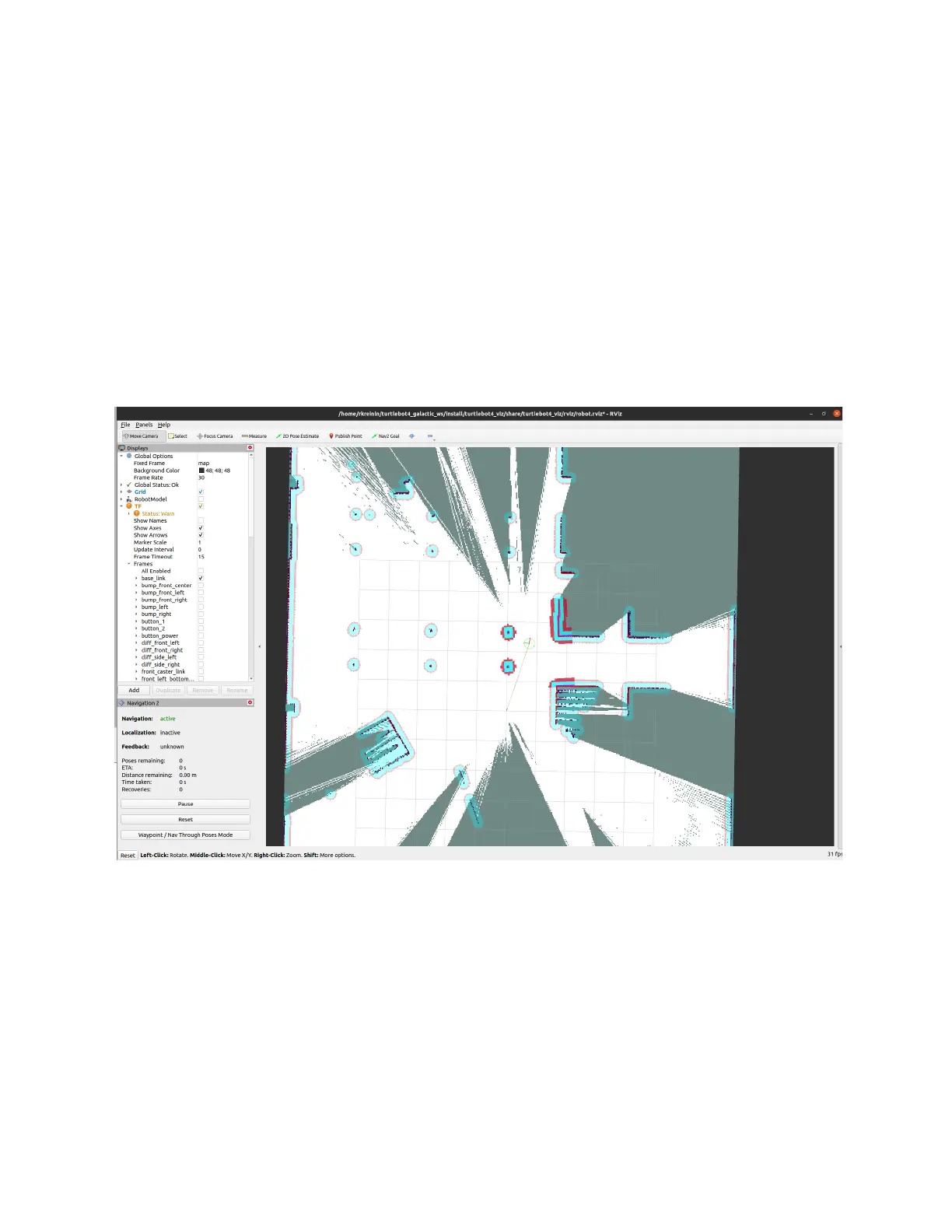
ros2 launch turtlebot4_viz view_robot.launch.py
Nav2 with SLAM
Obstacles that are detected on the map will have a padding around with a radius equivalent to
the radius of the robot. When navigating, Nav2 will drive the robot outside of the padded area to
avoid hitting obstacles.