www.cs-lab.eu
CS-Lab s.c. | CSMIO/IP-A 6-axis CNC controller. Manual tunning
3) Increase the "kAff" value as long as the "Mkit Following Error" value decrease.
• Too high value of the "kAff" causes an axis set position to be overtaken, which results in a new in-
crease in the "Mkit Following Error" value. Too high "KAff" value doesn't cause oscillation of an axis,
so we can only notice it in "Mkit Following Error" value progress.
• Too low "kAff" value wastes the potential of a servo drive, which results in an unnecessarily high
value of "Following Error".
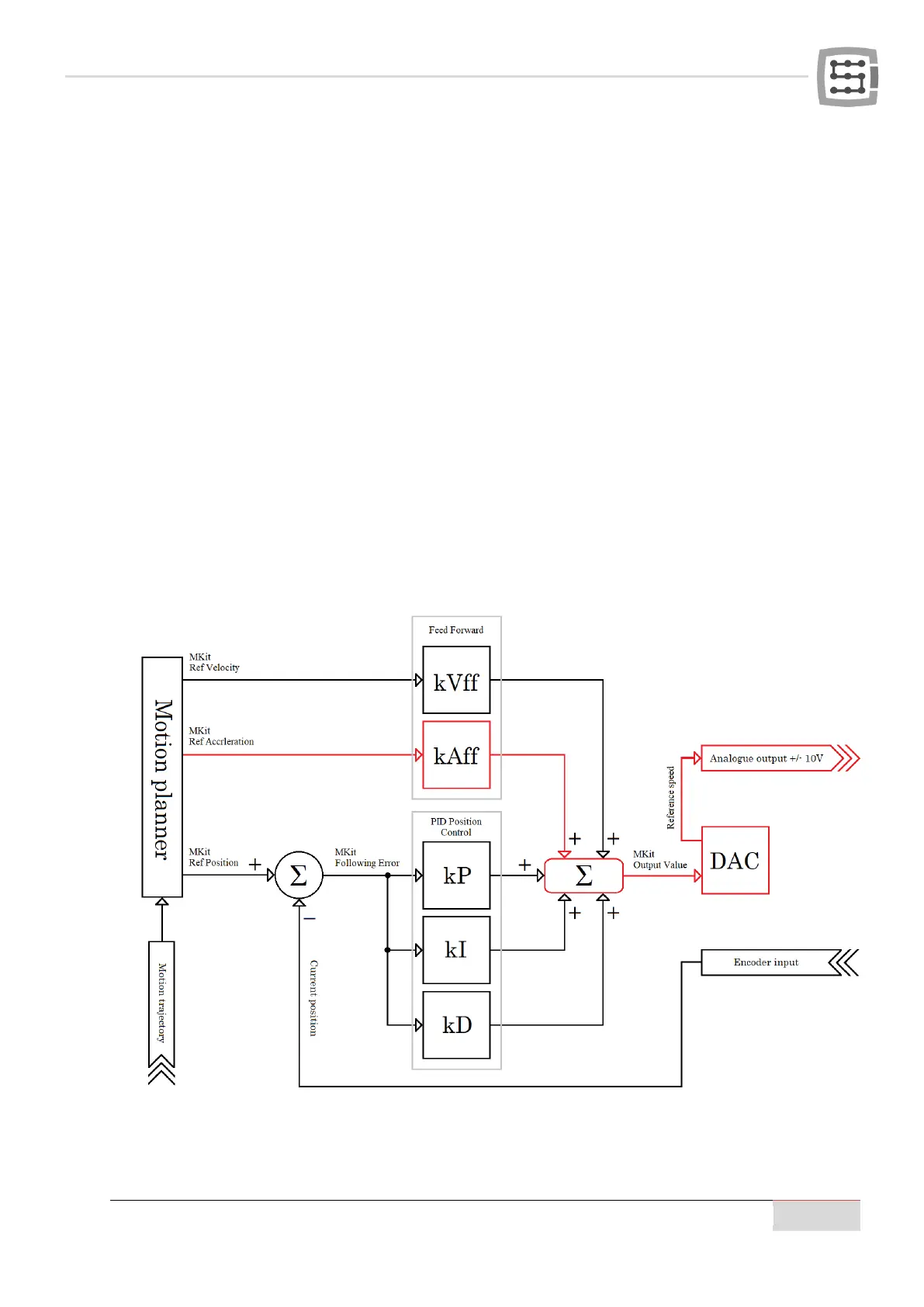
The "kAff" parameter is a gain value of acceleration, "feed forward". In simplification, the higher "kAff"
value, the higher value of voltage proportional to the value of "Mkit Ref Acceleration" (the set accelera-
tion, which an axis should get when making a set move) will go to +/-10V analog output of CSMIO/IP-A
controller.
"Feed forward" of acceleration highly supports the integral term of position PID regulator, which pro-
vides the value of the "kI" parameter may be much lower. This way, axis reaction time is shorter, and the
"Mkit Following Error" value is significantly reduced. We should just remember that the "kAff" value
should be set before the "kI" parameter.

 Loading...
Loading...
