3. Instruction Set
disappear after the power is cut off. There is no guarantee that the adjusted parameters are
suitable for every control requirement. Therefore, users can modify the adjusted parameters
according to specific needs, but it is suggested to modify only K
I
or K
D.
5. PID instruction has to be controlled with many parameters; therefore care should be taken
when setting each parameter in case the PID operation is out of control.
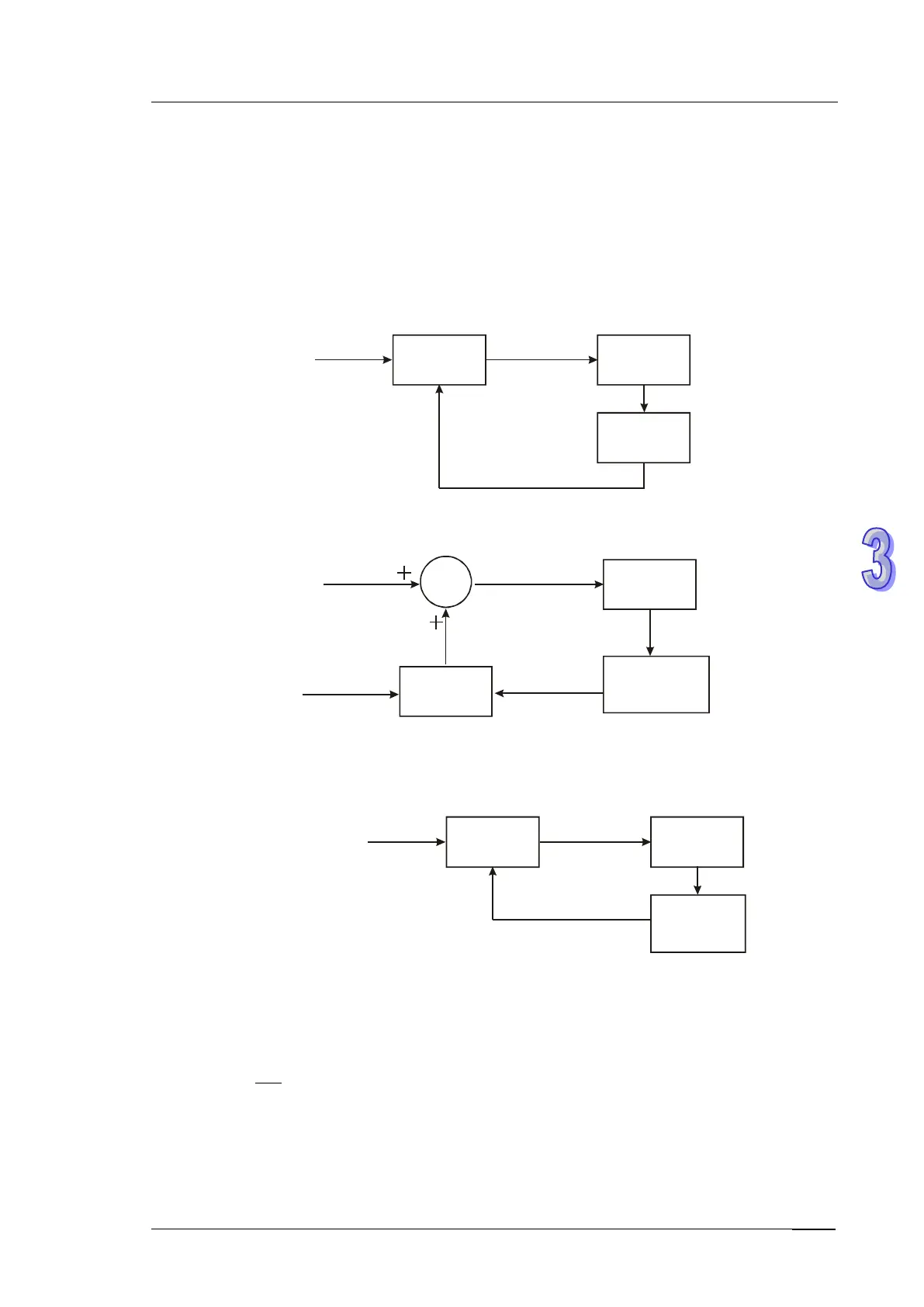
Example 1: Block diagram of application on positioning (S
3
+4 = 0)
PID
MV
Encoder
PV
Position instruction
(SV)
Controlled
device
Example 2: Block diagram of application on AC motor drive (S
3
+4 = 0)
PID
S+MV
Speed instruction (S)
Acceleration/deceleration
instruction (SV)
Acceleration/deceleration
output (MV)
Actual acceleration/
deceleration speed
(PV = S - P)
AC motor
drive
Speed
detection
device (P)
Example 3: Block diagram of application on temperature control (S
3
+4 = 1)
PID
Temperature instruction (SV)
Heating (MV)
Actual temperature
(PV)
Heater
Temperature
detection
device
Example 4: PID parameters adjustment
Assume that the transfer function of the controlled device G(S) in a control system is a first-order
function
(model of general motors), SV = 1, and sampling time (T
S
) = 10ms. Suggested
steps for adjusting the parameters are as follows: