Chapter 15 CANopen Overview│CP2000
15-12
15-3-4 Using Delta Standard (New definition)
15-3-4-1 Related set up for an AC motor drive (Delta New Standard)
Follow the steps below:
1. Wire the hardware (refer to Section 15-2 Wiring for CANopen)
2. Set the operation source: set Pr.00-21 to 3 for CANopen communication card control. (Run/stop,
forward/reverse run…, etc.)
3. Set the frequency source: set Pr.00-20 to 6. Choose the source of the frequency command from
the CANopen setting.
4. Set Delta Standard (New definition) as the control mode: Pr.09-40 = 0 and Pr.09-30 = 1.
5. Set the CANopen station: set Pr.09-36; the range is among 1–127. When Pr.09-36=0, the
CANopen slave function is disabled. Note: If an error appears (CAdE or CANopen memory error)
as you complete the station setting, set Pr.00-02=7 to reset.)
6. Set the CANopen baud rate: set Pr.09-37 (CANBUS Baud Rate: 1 Mbps (0), 500 Kbps (1), 250
Kbps (2), 125 Kbps (3), 100 Kbps (4) and 50 Kbps(5)).
15-3-4-2 Various mode control method (Delta New Standard)
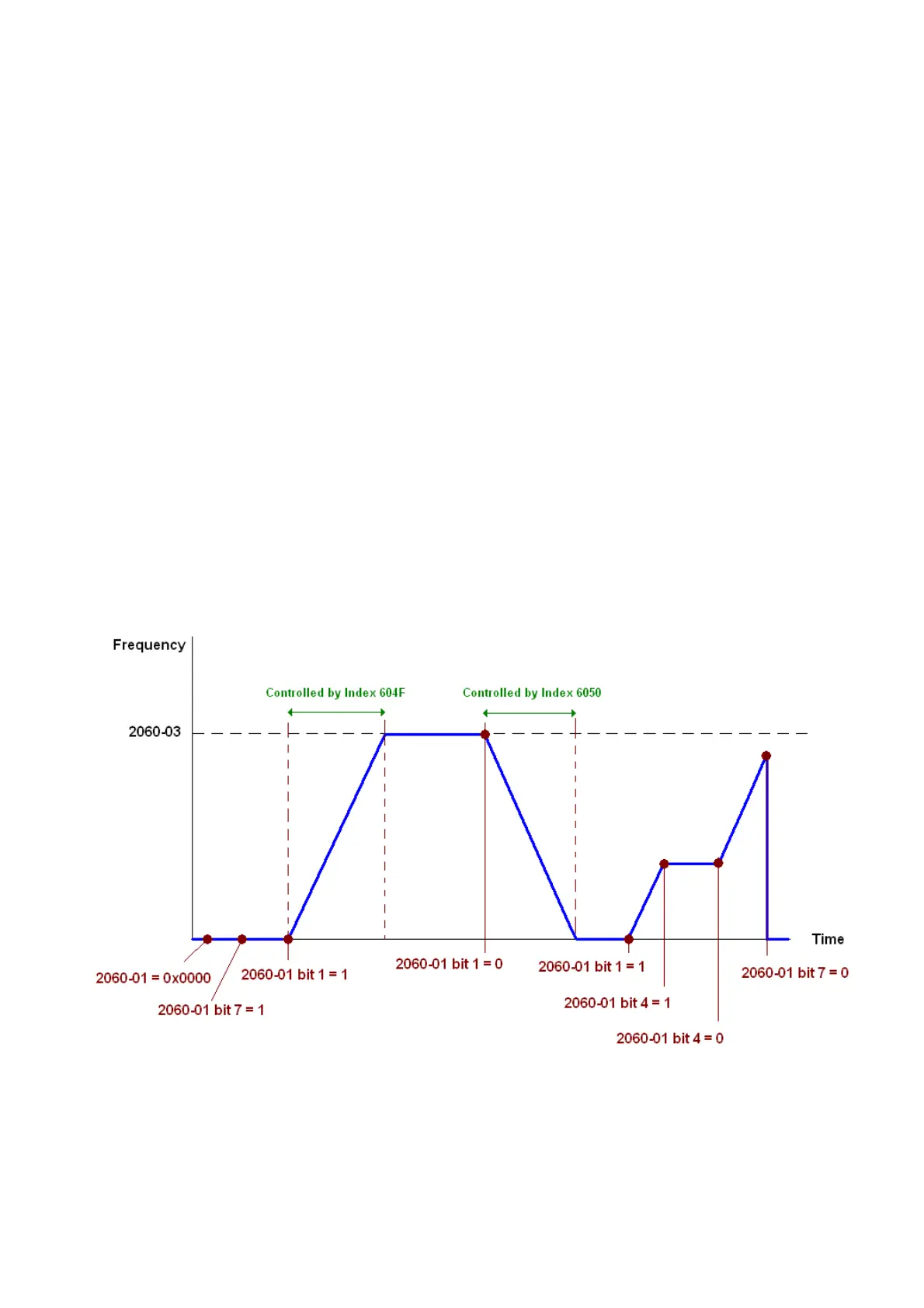
Speed Mode
1. Set CP2000 to speed control mode: set Index6060 = 2.
2. Set the target frequency: set 2060-03, unit is Hz, with 2 decimal places. For example, 1000 is
10.00Hz.
3. Operation control: set 2060-01 = 008H for Server on, and set 2060-01 = 0081H for running.
NOTE01: Read 2061-05 to get the current position.
NOTE02: Read bit0 of 2061 to find if the position has reached to the target position. (0: Not reached,
1: Reached).