Chapter 16 PLC Function Applications│CP2000
16-121
16-6-5 Detailed explanation of driver special applications commands
API
RPR
S1 S2
Read servo parameter
139
P
Bit device Word device
16-bit command (5 STEP)
RPR Continuous
execution type
RPRP Pulse
execution type
32-bit command
- - - -
Flag signal: none
X Y M K H KnX KnY KnM T C D
S1
* *
*
S2
*
Notes on operand usage: none
S1
: Parameter address of data to be read.
S2
: Register where data to be
read is stored.
API
WPR
S1 S2
Write servo parameter
140
P
Bit device Word device
16-bit command (5 STEP)
WPR Continuous
execution type
WPRP Pulse
execution type
32-bit command
- - - -
Flag signal: none
X Y M K H KnX KnY KnM T C D
S1
* *
*
S2
* *
*
Notes on operand usage: none
S1
: Data to write to specified page.
S2
: Parameter address of data to be
written.
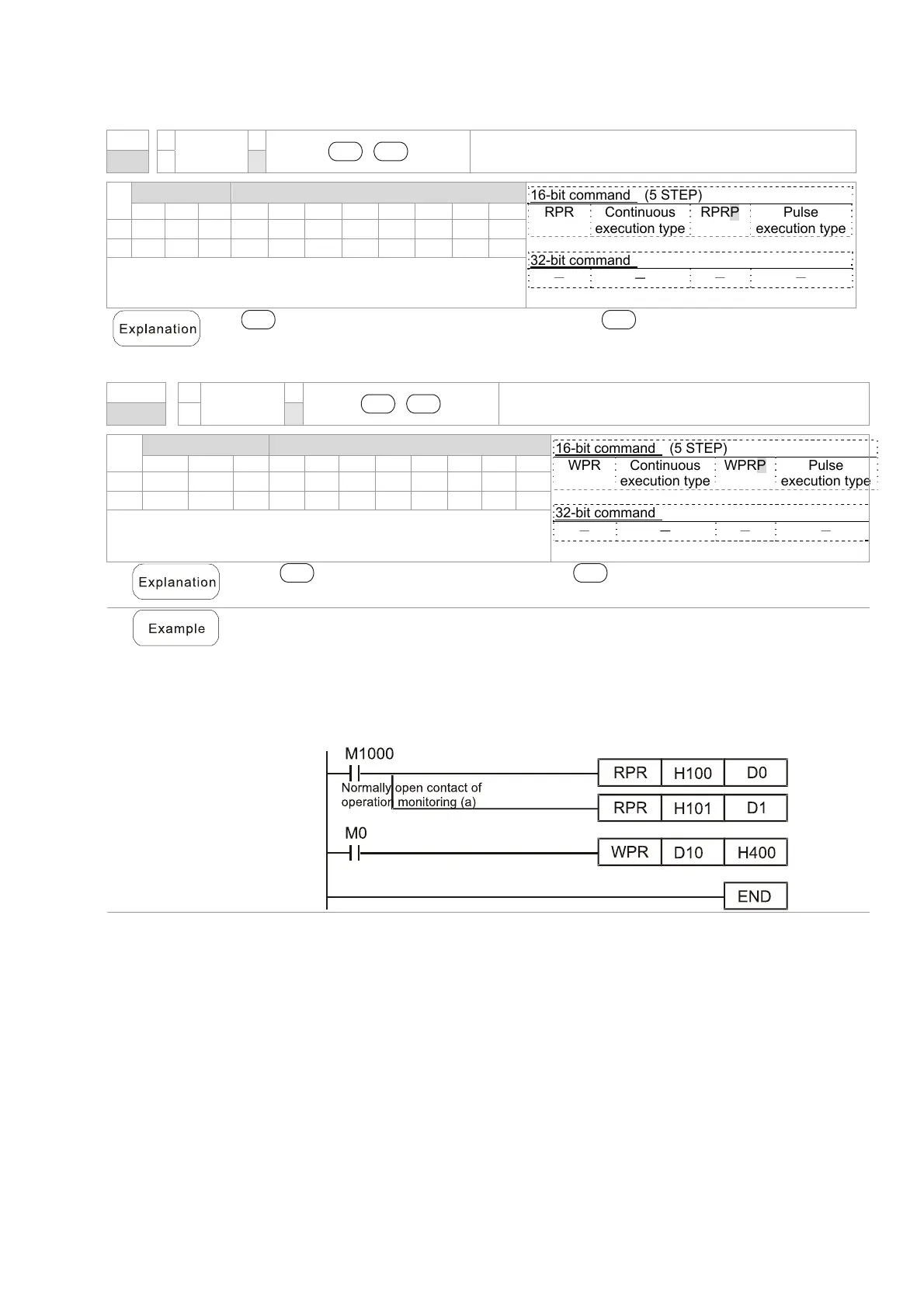
When the data in the CP2000 driver's parameter H01.00 is read and written to
D0, data from H01.01 will be read and written to D1.
When M0=On, the content of D10 will be written to the CP2000 driver
parameter 04.00 (first speed of multiple speed levels).
When the parameter has been written successfully, M1017=On.
The CP2000's WPR command does not support writing to the 20XX address,
but the RPR command supports reading of 21XX, 22XX.
Recommendation Take care when using the WPR command. When writing parameters, because
most parameters are recorded as they are written, these parameters may only be
revised 109 times; a memory write error may occur if parameters are written more
than 10
9
times.
Because the following commonly-used parameters have special processing, there
are no restrictions on the number of times they may be written.
Pr.00-11: Speed mode selection
Pr.00-27: User-defined value
Pr.01-12: Acceleration time 1
Pr.01-13: Deceleration time 1