Chapter 16 PLC Function Applications│CP2000
16-123
API
FPID
S1 S2 S3 S4
Driver PID control mode
141
P
Bit device Word device
16-bit command (9 STEP)
FPID Continuous
execution type
FPIDP Pulse
execution type
32-bit command
- - - -
Flag signal: none
X Y M K H KnX KnY KnM T C D
S1
* *
*
S2
* *
*
S3
* *
*
S4
* *
*
Notes on operand usage: none
S1
: PID reference target value input terminal select.
S2
: PID function
proportional gain P.
S3
: PID function integral time I.
S4
: PID function
differential time D.
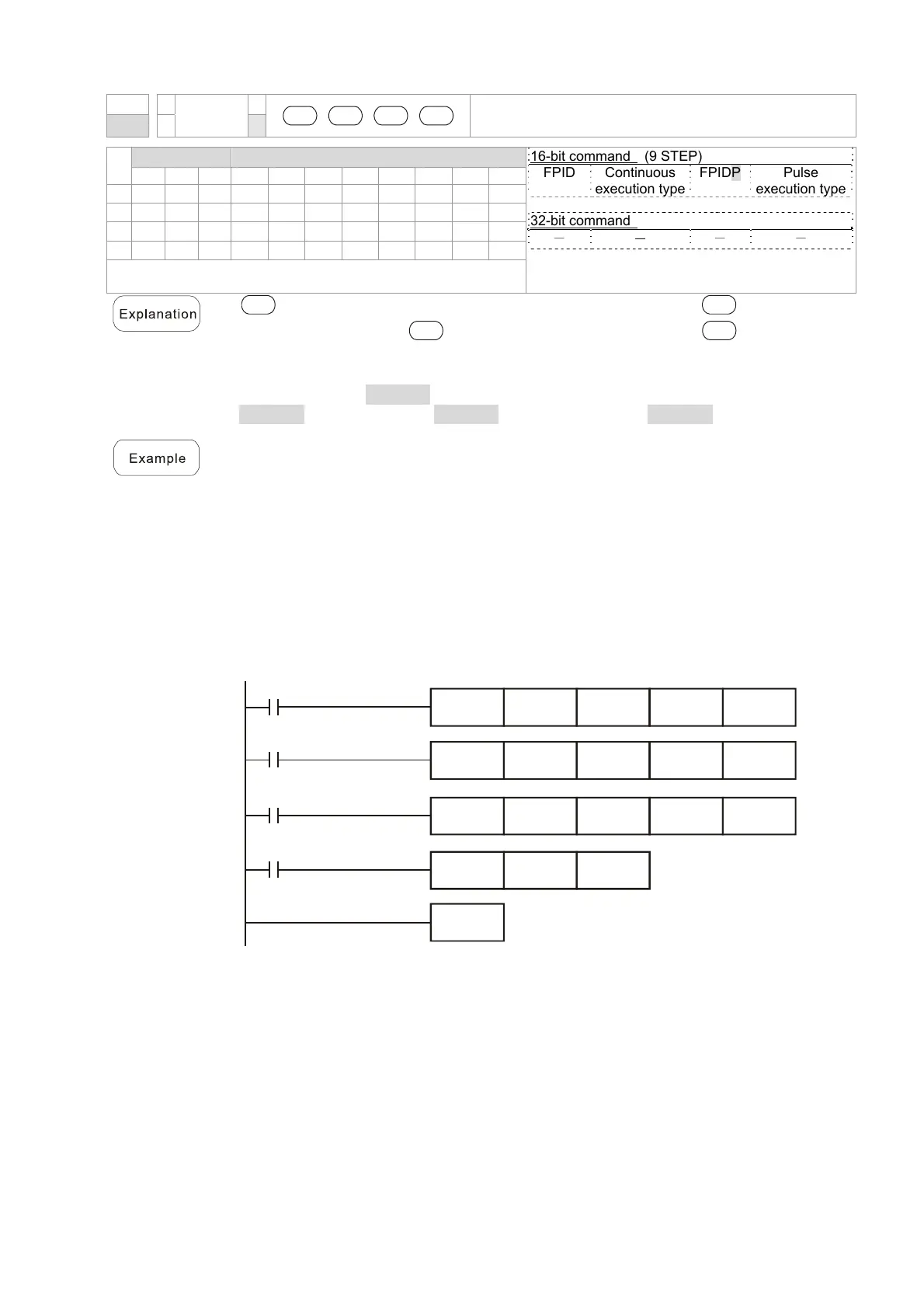
The FPID command can directly control the driver's feedback control of
PID parameter Pr.08-00 PID reference target value input terminal selection,
Pr.08-01 proposal gain P, Pr.08-02 integral time I, and Pr.08-03 differential time D.
When M0=On, the set PID reference target value input terminal selection is 0 (no
PID function), the PID function proportional gain P is 0, the PID function integral
time I is 1 (units: 0.01 sec.), and the PID function differential time D is 1 (units:
0.01 sec.).
When M1=On, the set PID reference target value input terminal selection is 0 (no
PID function), the PID function proportional gain P is 1 (units: 0.01), the
PID function integral time I is 0, and the PID function differential time D is 0.
When M2=On, the set PID reference target value input terminal selection is 1
(target frequency input is controlled from the digital keypad), the PID function
proportional gain P is 1 (units: 0.01), the PID function integral time I is 0, and the
PID function differential time D is 0.
D1027: Frequency command after PID operation.
END
H0
M2
M1
M0
M1000
H1
H0
H0
H1
H1
H1 H1
H0 H0
H0 H0
FPID
MOV
D1027
D1
FPID
FPID