_
`
ҋ
+ È È
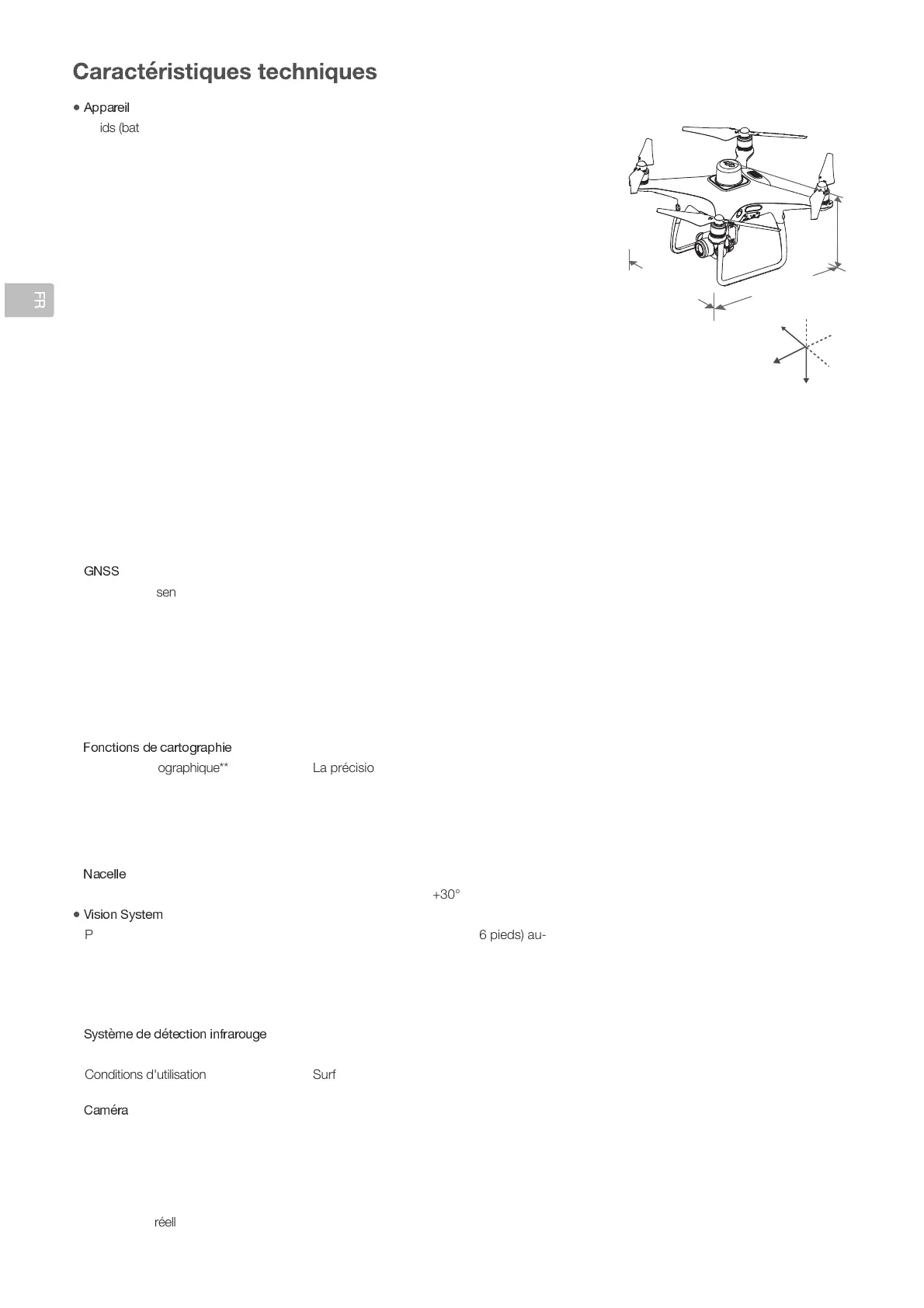
Poids (batterie et hélices incluses) 1391 g
Plafond pratique max. au-dessus du
niveau de la mer
6 000 m (19 685 pieds)
Vitesse ascensionnelle max. TZ]VSH\[VTH[PX\L"
5 m/s (commande manuelle)
Vitesse de descente max. 3 m/s
Vitesse max. RTOTWO4VKL7"
58 km/h (36 mph) (Mode A)
Temps de vol max. Environ 30 minutes
Température de fonctionnement n*n-
Fréquence de fonctionnement ./an./a,\YVWL1HWVU*VYtL
./an./ai[H[Z<UPZ*OPUL
EIRP 2,4 GHz
CE (Europe)/MIC (Japon)/KCC (Corée) : < 20 dBm
5,8 GHz
-**i[H[Z<UPZ:99**OPULJVU[PULU[HSL5**;HP^HU*OPUL!#K)T
Plage de précision du vol stationnaire RTK activé et fonctionnant correctement :
=LY[PJHSL!T"OVYPaVU[HSL!T
RTK désactivé :
=LY[PJHSL!TH]LJ7VZP[PVUULTLU[]PZ\LS"TH]LJWVZP[PVUULTLU[.5::
/VYPaVU[HSL!TH]LJ7VZP[PVUULTLU[]PZ\LS"TH]LJWVZP[PVUULTLU[.5::
Décalage de la position de l'image La position du centre de la caméra est relative au centre de phase de l'antenne D-RTK
LTIHYX\tLZV\ZSH_LK\JVYWZKLSHWWHYLPS!L[ TTKtQnHWWSPX\tH\_
coordonnées d'image dans les données Exif. Les axes positifs x, y et z du corps de l'appareil
pointent vers l'avant, vers la droite et vers le bas, respectivement.
ҋ
.5::OH\[LZLUZPIPSP[tnMYtX\LUJL
unique
.7:)LP+V\.HSPSLV(ZPL".7:.365(::.HSPSLVH\[YLZaVULZNtVNYHWOPX\LZ
RTK GNSS haute précision,
multisystème, multifréquence
Fréquence utilisée
.7:!33".365(::!33")LP+V\!))".HSPSLV!,,
Obtention de la première position : < 50 s
7YtJPZPVUKLWVZP[PVUULTLU[!=LY[PJHSLJTWWT94:"OVYPaVU[HSLJTWWT
(RMS).
La valeur 1 ppm indique une erreur avec une augmentation de 1 mm sur 1 km de déplacement.
Précision de vitesse : 0,03 m/s
ҋ
! $ ! , $ ! È %
Précision cartographique** La précision de la cartographie répond aux exigences des normes de précision ASPRS pour
les orthophotographies numériques de classe III.
Résolution au sol (GSD) /JTWP_LS/t[HU[SHS[P[\KLKLSHWWHYLPSWHYYHWWVY[nSHZJuULKL[V\YUHNL\UP[t!T
,ѝJHJP[tKLSHJX\PZP[PVU Zone maximale de fonctionnement : environ 1 km
2
WV\Y\UZL\S]VSn\ULHS[P[\KLKLT
JLZ[nKPYLH]LJ\UL.:+KLU]PYVUJTWP_LSYtWVUKHU[H\_L_PNLUJLZKLZUVYTLZKL
précision ASPRS pour les orthophotographies numériques de classe III).
ҋ
$
Plage réglable (UNSL]LY[PJHS! n
ҋ
É ! & "
Plage de vitesse RTOTWOnTWPLKZH\KLZZ\ZK\ZVSH]LJ\UtJSHPYHNLHKtX\H[
Plage d'altitude 0 - 10 m (0 - 33 pieds)
Portée 0 - 10 m (0 - 33 pieds)
Plage de détection d'obstacles nTn WPLKZ
Conditions d'utilisation Surfaces régulières et bien éclairées (> 15 lux)
ҋ
& Ê " , , Ë $ ! !
Plage de détection d'obstacles nTnWPLKZ
Conditions d'utilisation :\YMHJLH]LJTH[tYPH\nYtÅL_PVUKPќ\ZLL[YtÅLJ[P]P[t%JVTTLSLZT\YZSLZHYIYLZSLZ
humains, etc.)
ҋ
4 " Ë
Capteur *46:"WP_LSZLќLJ[PMZ!4
* pris en charge ultérieurement
** La précision réelle dépend de l'éclairage et des surfaces environnantes, de l'altitude des appareils, du logiciel de cartographie utilisé et d'autres
facteurs de prise de vue.
Y
2
8
9,5°m
m
289
,
5
°
m
m
°TT

 Loading...
Loading...













